บล็อกฟังก์ชันทิศทางความเร็ว EMD ที่สอดคล้องกับ Danfoss
ข้อมูลจำเพาะ
- ชื่อสินค้า: บล็อคฟังก์ชันทิศทางเซ็นเซอร์ความเร็ว EMD ที่สอดคล้องกับ PLUS+1
- เอาท์พุต: สัญญาณ RPM และทิศทาง
- ช่วงอินพุต:
- ความเร็ว (Spd): 1,250 ถึง 10,000,000
- ทิศทาง (Dir In): 0 ถึง 5,250 โวลต์
คำแนะนำการใช้ผลิตภัณฑ์
การกำหนดค่าตัวควบคุม
บล็อกฟังก์ชัน EMD_SPD_DIR ส่งสัญญาณรอบต่อนาทีและทิศทางตามอินพุตจากเซ็นเซอร์ความเร็ว EMD ใช้ได้กับตัวควบคุม MC และ SC
ข้อกำหนดอินพุตของตัวควบคุม
ข้อกำหนดอินพุตคอนโทรลเลอร์สำหรับบล็อกฟังก์ชัน EMD SPD DIR มีดังนี้:
- ผู้ควบคุม MC:
- Spd – MFIn – ไดรอิน
- ผู้ควบคุม SC:
- ความเร็ว – MFIn – DirIn – DigAn
อินพุตบล็อคฟังก์ชัน
อินพุตของบล็อกฟังก์ชัน EMD_SPD_DIR มีดังนี้:
- Spd (ความเร็ว): รถบัสต่อ U32 จำนวน U16 – พิสัย:
1,250 ถึง 10,000,000 - กำกับโดย (Direction): บัส โวลต์/โวลท์tagอี ยู16 –
ช่วง: 0 ถึง 5,250 โวลต์
เอาท์พุตของบล็อคฟังก์ชัน
เอาท์พุตของบล็อกฟังก์ชัน EMD_SPD_DIR มีดังนี้:
- สถานะ: U16 – ช่วง: 0 ถึง 65,535
- ความผิดพลาด: U16 – ช่วง: 0 ถึง 1,000,000,000
- รอบต่อนาที: U16 – ช่วง: 0 ถึง 25,000
- dRPM: U16 – ช่วง: 0 ถึง 2,500
- ผบ: S8 – ค่า: -1, 0, +1
คำถามที่พบบ่อย
- วัตถุประสงค์ของฟังก์ชัน EMD_SPD_DIR คืออะไร
บล็อกฟังก์ชัน EMD_SPD_DIR ส่งสัญญาณรอบต่อนาทีและทิศทางตามอินพุตจากเซ็นเซอร์ความเร็ว EMD - ข้อกำหนดอินพุตสำหรับบล็อกฟังก์ชัน EMD_SPD_DIR บนตัวควบคุม MC คืออะไร
ข้อกำหนดอินพุตสำหรับตัวควบคุม MC คือ Spd, MFIn และ DirIn - ปริมาตรคืออะไรtagช่วง e สำหรับอินพุตทิศทาง (Dir In) ของบล็อคฟังก์ชัน EMD_SPD_DIR
ฉบับที่tagช่วงแรงดันไฟสำหรับอินพุตทิศทางคือ 0 ถึง 5,250 โวลต์
ประวัติการแก้ไข
ตารางการแก้ไข
| วันที่ | เปลี่ยน | เรฟ |
| เดือนธันวาคม 2014 | AA |
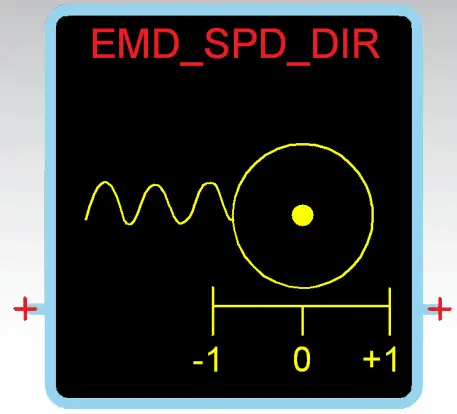
บล็อคฟังก์ชัน EMD_SPD_DIR
เกินview
บล็อกฟังก์ชันนี้จะส่งสัญญาณรอบต่อนาทีและทิศทางตามอินพุตจากเซ็นเซอร์ความเร็ว EMD บนตัวควบคุมทั้ง MC และ SC บล็อกฟังก์ชันนี้จะรับสัญญาณดังต่อไปนี้:
- อินพุต Spd ผ่านอินพุต MFIn
- อินพุต DirIn ผ่านอินพุต MFIn ที่สองหรืออินพุต DigAn
ข้อกำหนดอินพุตของตัวควบคุมสำหรับบล็อคฟังก์ชัน EMD
ตารางต่อไปนี้แสดงรายการข้อกำหนดอินพุตตัวควบคุมสำหรับบล็อคฟังก์ชัน EMD SPD DIR, EMD SPD DIR A และ EMD SPD DIR D
การเชื่อมต่ออินพุต—ตัวควบคุม MC
| บล็อกฟังก์ชัน | ฟังก์ชันการป้อนบล็อก | อินพุตคอนโทรลเลอร์ | ความคิดเห็น |
| ผู้อำนวยการฝ่าย EMD SPD | ความเร็ว | เอ็มเอฟอิน | กำหนดความเร็วผ่านสัญญาณพัลส์จากเซ็นเซอร์ |
| ผอ. | เอ็มเอฟอิน | ใช้ตัวต้านทานแบบดึงขึ้น/ดึงลงและปริมาตรtage เพื่อตรวจจับความผิดพลาดของวงจรเปิดของสัญญาณทิศทาง | |
| กองอำนวยการ EMD SPD ก. | ความเร็ว | เอ็มเอฟอิน | กำหนดความเร็วผ่านสัญญาณพัลส์จากเซ็นเซอร์ |
| ผอ. | ดิแกน | ตรวจจับเฉพาะเมื่อสัญญาณทิศทางมีระดับเสียงtage อยู่นอกช่วงที่คาดไว้ แต่ขาดตัวต้านทานดึงขึ้น/ดึงลงสำหรับการตรวจจับวงจรเปิด | |
| อาอิน | ตรวจจับเฉพาะเมื่อสัญญาณทิศทางมีระดับเสียงtage อยู่นอกช่วงที่คาดไว้ แต่ขาดตัวต้านทานดึงขึ้น/ดึงลงสำหรับการตรวจจับวงจรเปิด | ||
| ดัชนีชี้วัด EMD | ความเร็ว | เอ็มเอฟอิน | กำหนดความเร็วผ่านสัญญาณพัลส์จากเซ็นเซอร์ |
| ดิกไดร์ | ขุดเข้าไป | ไม่ตรวจจับความผิดพลาดสำหรับสัญญาณทิศทาง | |
| ดิแกน | ไม่ตรวจจับความผิดพลาดสำหรับสัญญาณทิศทาง |
การเชื่อมต่ออินพุต—ตัวควบคุม SC
| บล็อกฟังก์ชัน | ฟังก์ชันการป้อนบล็อก | อินพุตคอนโทรลเลอร์ | ความคิดเห็น |
| ผู้อำนวยการฝ่าย EMD SPD | ความเร็ว | เอ็มเอฟอิน | กำหนดความเร็วผ่านสัญญาณพัลส์จากเซ็นเซอร์ อินพุตของตัวควบคุมจะต้องมีป้ายกำกับ ขุด/อาน่า/ความถี่. |
| ผอ. | เอ็มเอฟอิน | ใช้ตัวต้านทานแบบดึงขึ้น/ดึงลงและปริมาตรtage เพื่อตรวจจับความผิดพลาดของวงจรเปิดของสัญญาณทิศทาง | |
| ดิแกน | ใช้ตัวต้านทานแบบดึงขึ้น/ดึงลงและปริมาตรtage เพื่อตรวจจับความผิดพลาดของวงจรเปิดของสัญญาณทิศทาง |
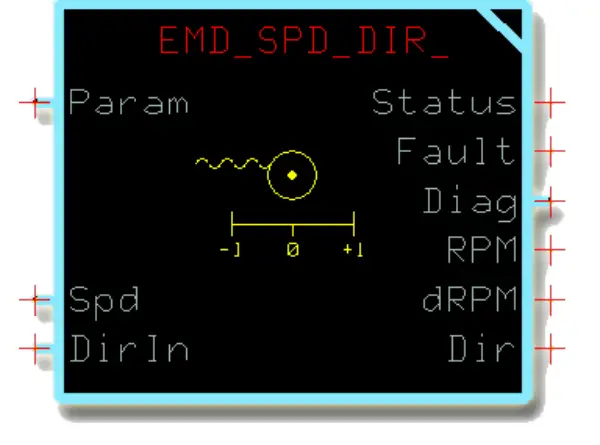
อินพุตบล็อคฟังก์ชัน
| รายการ | พิมพ์ | พิสัย | คำอธิบาย |
| พาราม | รสบัส | - | อินพุตสำหรับพารามิเตอร์ทั่วไปที่สามารถนำไปใช้กับบล็อคฟังก์ชันหลายรายการ ดู เกี่ยวกับอินพุตพารามิเตอร์ ในหน้า 11 เพื่อดูข้อมูลเพิ่มเติม |
| ความเร็ว | รสบัส | - | อินพุตสำหรับบัสด้วย:
|
| ต่อ | ยู32 | 1,250 ถึง
10,000,000 |
ผลผลิตของช่วงเวลาที่วัดโดย เซ็นเซอร์ความเร็ว.
บล็อคฟังก์ชั่นใช้ ต่อ สัญญาณ, นับ สัญญาณ และ พัลส์/เรฟ ค่าพารามิเตอร์ในการคำนวณ รอบต่อนาที เอาท์พุต 10,000 = 1,000 μs. |
| นับ | ยู16 | 0 ถึง 65,535 | จำนวนนับที่วัดต่อเอาท์พุตของวงจรโปรแกรมโดย เซ็นเซอร์ความเร็ว.
บล็อคฟังก์ชั่นใช้ ต่อ สัญญาณ, นับ สัญญาณ และ พัลส์/เรฟ ค่าพารามิเตอร์ในการคำนวณ รอบต่อนาที เอาท์พุต 1,000 = 1,000. |
| การกำหนดค่า | รถบัสรอง | - | ประกอบด้วยสัญญาณที่กำหนดค่าอินพุตนี้ |
| ผู้กำกับใน | รสบัส | - | อินพุตสำหรับบัสด้วย:
|
| โวลต์/โวลท์tage | ยู16 | 0 ถึง 5,250 | ปริมาตรที่วัดได้tage ของสัญญาณทิศทางที่ เซ็นเซอร์ความเร็ว เอาท์พุตที่บล็อคใช้ในการกำหนดทิศทาง |
| การกำหนดค่า | รถบัสรอง | - | ประกอบด้วยสัญญาณที่กำหนดค่าอินพุตนี้ |
เอาท์พุต
เอาท์พุตของบล็อคฟังก์ชัน
| รายการ | พิมพ์ | พิสัย | คำอธิบาย |
| สถานะ | ยู16 | - | รายงานสถานะของบล็อคฟังก์ชั่น
บล็อคฟังก์ชั่นนี้ใช้ ไม่ได้มาตรฐาน รูปแบบตามบิตเพื่อรายงานสถานะและความผิดพลาด
|
| ความผิดพลาด | ยู16 | - | รายงานข้อผิดพลาดของบล็อคฟังก์ชัน
บล็อคฟังก์ชั่นนี้ใช้ ไม่ได้มาตรฐาน รูปแบบตามบิตเพื่อรายงานสถานะและความผิดพลาด
|
| diag | รสบัส | - | ส่งออกบัสด้วย ความถี่, ฟล็ตต์มอร์ดีร์, และ FltTmrความถี่ สัญญาณที่มีไว้เพื่อการแก้ไขปัญหา |
| ความถี่ | ยู32 | 0 ถึง 1,000,
000,000 |
ความถี่ที่วัดได้ของเซ็นเซอร์ความเร็ว 100,000 = 10,000 เฮิรตซ์ |
| ข้อผิดพลาดTmrFreq | ยู16 | 0 ถึง 65,535 | เมื่อเกิดความผิดพลาดด้านความถี่:
|
| ฟล็ตต์มอร์ดีร์ | ยู16 | 0 ถึง 65,535 | เมื่อมีความผิดพลาดทางทิศทาง:
|
| รอบต่อนาที | ยู16 | 0 ถึง 2,500 | รอบการหมุนของเซ็นเซอร์ความเร็วต่อนาที
บล็อคฟังก์ชั่น clampเอาต์พุตนี้อยู่ที่ 2,500 = 1 รอบต่อนาที |
| dRPM | ยู16 | 0 ถึง 25,000 | เซ็นเซอร์ความเร็วรอบต่อนาที x 10 (deciRPM) บล็อกฟังก์ชัน clampนี่คือผลลัพธ์ที่ 25,000 |
| ผกก. | S8 | -1, 0, +1 | ทิศทางการหมุนของเซ็นเซอร์ความเร็ว
|
เกี่ยวกับการเชื่อมต่อฟังก์ชันบล็อค
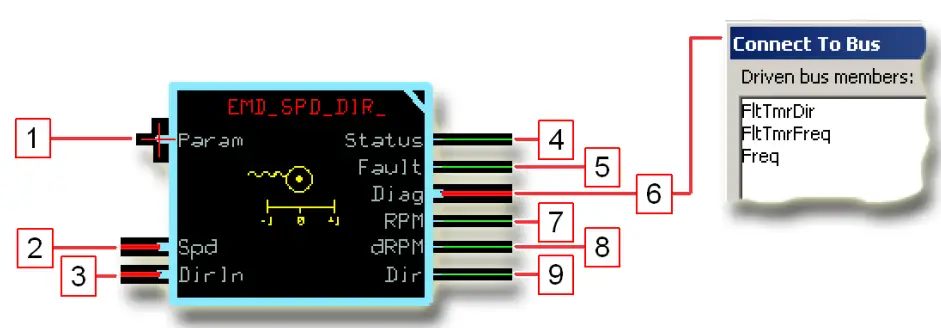
เกี่ยวกับการเชื่อมต่อฟังก์ชันบล็อค
| รายการ | คำอธิบาย |
| 1. | อินพุตสำหรับพารามิเตอร์ทั่วไปที่สามารถนำไปใช้กับบล็อกฟังก์ชั่นหลายรายการได้ |
| 2. | อินพุตสำหรับบัสด้วย:
|
| 3. | อินพุตสำหรับบัสด้วย:
|
| 4. | รายงานสถานะของบล็อคฟังก์ชั่น |
| 5. | รายงานข้อผิดพลาดของบล็อคฟังก์ชั่น |
| 6. | ส่งออกบัสด้วย ความถี่, ฟล็ตต์มอร์ดีร์, และ FltTmrความถี่ สัญญาณที่มีไว้เพื่อการแก้ไขปัญหา |
| 7. | รอบการหมุนของเซ็นเซอร์ความเร็วต่อนาที |
| 8. | เซ็นเซอร์ความเร็วรอบต่อนาที x 10 (เดซิRPM) |
| 9. | ทิศทางการหมุนของเซ็นเซอร์ความเร็ว
|
ตรรกะสถานะและความผิดพลาด
ต่างจากบล็อคฟังก์ชันที่สอดคล้องกับ PLUS+1 ส่วนใหญ่ บล็อคฟังก์ชันนี้ใช้รหัสสถานะและรหัสข้อผิดพลาดที่ไม่เป็นมาตรฐาน
ตรรกะสถานะ
| สถานะ | เลขฐานสิบหก* | ไบนารี | สาเหตุ | การตอบสนอง | การแก้ไข |
| พารามิเตอร์อยู่นอกช่วง | ขนาด 0x0008 | 1000 | พัลส์/เรฟ, ข้อผิดพลาด DetTm, หรือ ดิรล็อคเฮิรตซ์ พารามิเตอร์อยู่นอกช่วง | บล็อคฟังก์ชั่น clampคือค่าที่อยู่นอกช่วงไม่ว่าจะเป็นขีดจำกัดบนหรือขีดจำกัดล่าง | รับพารามิเตอร์นอกช่วงกลับเข้ามาภายในช่วง |
* บิต 16 ตั้งค่าเป็น 1 ระบุสถานะ Danfoss มาตรฐานหรือรหัสข้อผิดพลาด
ตรรกะความผิดพลาด
| ความผิดพลาด | เลขฐานสิบหก* | ไบนารี | สาเหตุ | การตอบสนอง | ล่าช้า† | สลัก‡ | การแก้ไข |
| ต่อ สัญญาณในบล็อคฟังก์ชั่น ความเร็ว ค่าอินพุทต่ำเกินไป | ขนาด 0x0001 | 0001 | ต่อ สัญญาณ < 1,250 Hz. | บล็อกฟังก์ชั่นส่งออกสูงสุด รอบต่อนาที และ dRPM คุณค่า | Y | N | ตรวจสอบปัญหาฮาร์ดแวร์ เช่น สัญญาณรบกวนทางไฟฟ้า ซึ่งอาจทำให้เกิดข้อผิดพลาด ต่อ ค่าสัญญาณ |
| โวลต์/โวลท์tage สัญญาณในบล็อคฟังก์ชั่น ความเร็ว อินพุตอยู่นอกช่วง | ขนาด 0x0002 | 0010 | โวลต์/โวลท์tage สัญญาณอยู่ระหว่าง 1,000 ถึง 2,500 mV
และ บล็อกไม่ได้รับพัลส์จากเซ็นเซอร์ความเร็ว |
บล็อกฟังก์ชั่นจะตั้งค่า รอบต่อนาที และ dRPM เอาท์พุตเป็น 0 | Y | N | ตรวจสอบปัญหาฮาร์ดแวร์ เช่น สัญญาณรบกวนทางไฟฟ้า ซึ่งอาจทำให้เกิดข้อผิดพลาด โวลต์/ โวลท์tage ค่าสัญญาณ |
| โวลต์/โวลท์tage สัญญาณในบล็อคฟังก์ชั่น ผกก. อินพุตอยู่นอกช่วง | ขนาด 0x0004 | 0100 | โวลต์/โวลท์tage สัญญาณอยู่ระหว่าง 1,000 ถึง 2,500
mV |
บล็อกฟังก์ชั่นจะตั้งค่า ผกก. เอาท์พุตเป็น 0 | Y | N | ตรวจสอบปัญหาฮาร์ดแวร์ เช่น สัญญาณรบกวนทางไฟฟ้า ซึ่งอาจทำให้เกิดข้อผิดพลาด โวลต์/ โวลท์tage ค่าสัญญาณ |
* บิต 16 ตั้งค่าเป็น 1 ระบุสถานะ Danfoss มาตรฐานหรือรหัสข้อผิดพลาด
† ข้อผิดพลาดที่ล่าช้าจะได้รับการรายงานหากสภาพข้อผิดพลาดที่ตรวจพบยังคงอยู่เป็นเวลาหน่วงเวลาที่ระบุ ข้อผิดพลาดที่ล่าช้าจะไม่สามารถล้างได้จนกว่าสภาพข้อผิดพลาดจะยังคงไม่ถูกตรวจพบเป็นเวลาหน่วงเวลา
‡ บล็อกฟังก์ชันจะรักษารายงานข้อผิดพลาดที่ล็อกไว้จนกระทั่งล็อกจะปล่อย
พารามิเตอร์ฟังก์ชันบล็อก
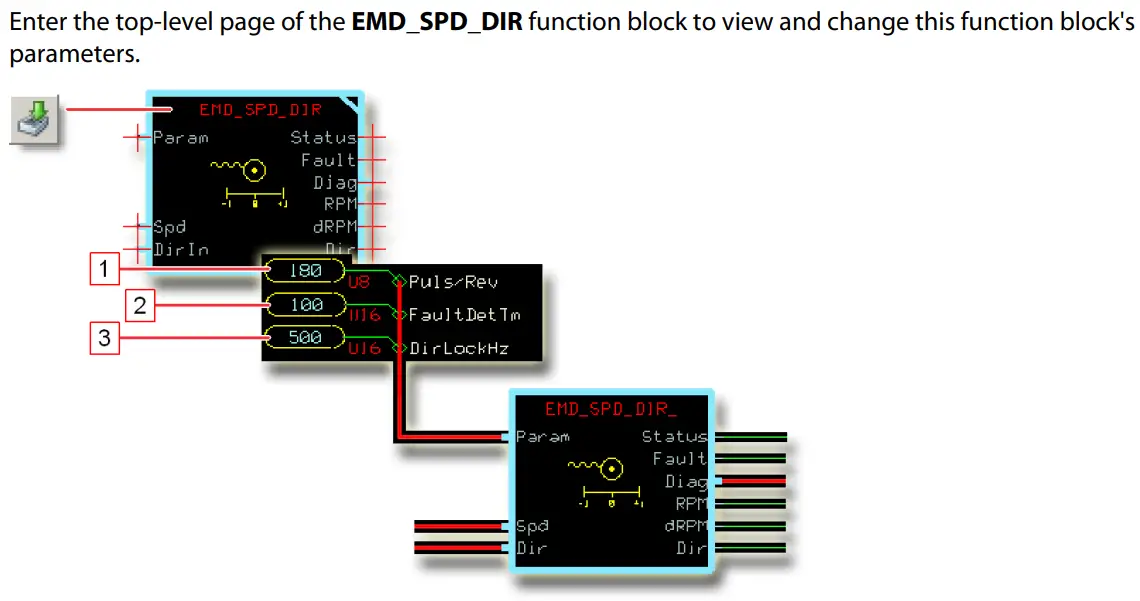
พารามิเตอร์ฟังก์ชันบล็อก
| รายการ | พิมพ์ | พิสัย | คำอธิบาย |
| 1. พัลส์/เรฟ | U8 | 20–120, 180 | จำนวนพัลส์ต่อรอบของเซ็นเซอร์ความเร็ว ดูที่ ข้อมูลทางเทคนิคของเซ็นเซอร์ความเร็ว EMD (ชิ้นส่วน Danfoss L1017287) สำหรับค่าที่ถูกต้อง |
| 2. การตรวจจับความผิดพลาด | ยู16 | 0–65,535 | ตั้งค่าเวลาที่บล็อกฟังก์ชันตรวจพบ:
|
| 3. ดิรล็อคเฮิรตซ์ | ยู16 | 0–8,000 | ตั้งค่าความถี่ที่สูงกว่าที่บล็อคฟังก์ชัน ผกก. ล็อคเอาท์พุต เหนือความถี่นี้ บล็อกฟังก์ชันจะไม่รายงานการเปลี่ยนแปลงทิศทาง
1,000 = 1,000 เฮิรตซ์. |
เกี่ยวกับอินพุตพารามิเตอร์
ใช้อินพุต Param เพื่อป้อนค่าพารามิเตอร์ภายนอกไปยังบล็อกฟังก์ชันนี้

รายละเอียดรูปภาพ
| รายการ | คำอธิบาย |
| 1. | ภายในหน้าระดับบนสุดของบล็อคฟังก์ชัน ก่อนที่คุณจะแก้ไขหน้านี้เพื่อยอมรับพารามิเตอร์ทั่วไปผ่านทาง พาราม ป้อนข้อมูล. |
| 2. | ภายในหน้าระดับบนสุดของบล็อคฟังก์ชัน หลังจากที่คุณแก้ไขหน้านี้เพื่อยอมรับพารามิเตอร์ทั่วไปผ่านทาง พาราม ป้อนข้อมูล. |
การกำหนดค่าตัวควบคุม
อินพุตบนตัวควบคุม MC และ SC ต้องมีการกำหนดค่าเพื่อทำงานกับบล็อกฟังก์ชันนี้ ดู:
- การกำหนดค่าตัวควบคุม MC ในหน้า 12
- การกำหนดค่าตัวควบคุม SC บนหน้า 16
การกำหนดค่าตัวควบคุม MC
การกำหนดค่าการป้อนข้อมูล
| ฟังก์ชันการป้อนบล็อก | ประเภทอินพุตที่เข้ากันได้ | การดำเนินการกำหนดค่า |
| ความเร็ว | เอ็มเอฟอิน | ลบ:
|
| ผอ. | เอ็มเอฟอิน | ลบ:
|
| ดิแกน | ลบ:
|
การกำหนดค่าตัวควบคุม
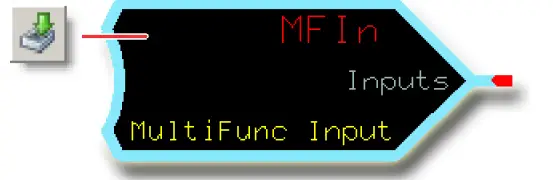
วิธีการกำหนดค่า MFIn สำหรับอินพุต Spd
- ในเทมเพลต GUIDE ให้เข้าสู่หน้าอินพุต
- ป้อน MFIn ที่รับสัญญาณอินพุต
- ดำเนินการเปลี่ยนแปลงตามที่แสดงในรูปต่อไปนี้
การกำหนดค่าตัวควบคุม
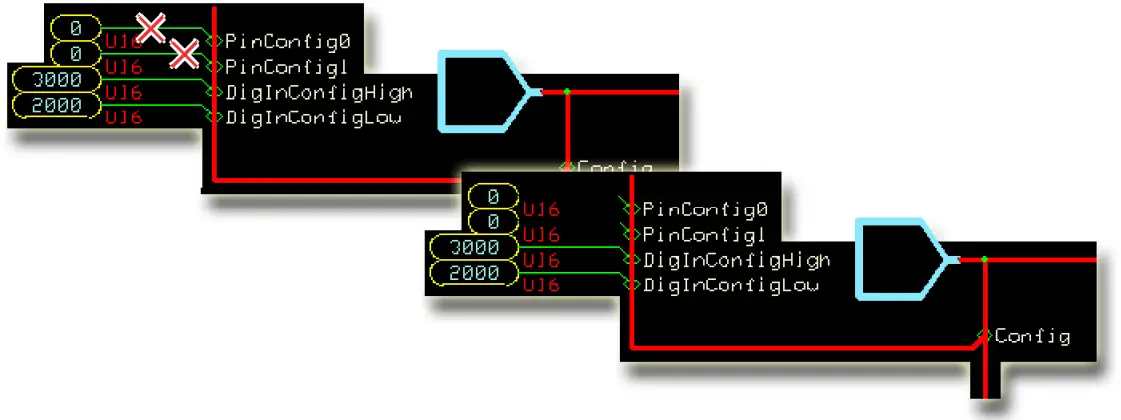
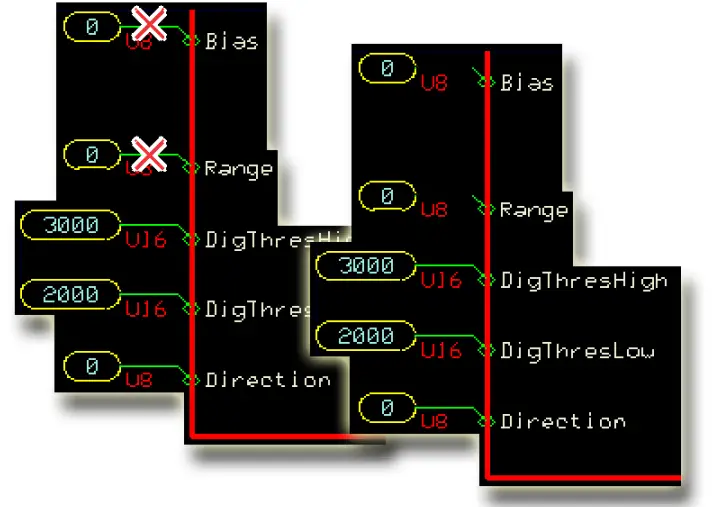
วิธีการกำหนดค่า MFIn สำหรับอินพุต DirIn
- ในเทมเพลต GUIDE ให้เข้าสู่หน้าอินพุต
- ป้อน MFIn ที่รับสัญญาณอินพุต
- ดำเนินการเปลี่ยนแปลงตามที่แสดงในรูปต่อไปนี้
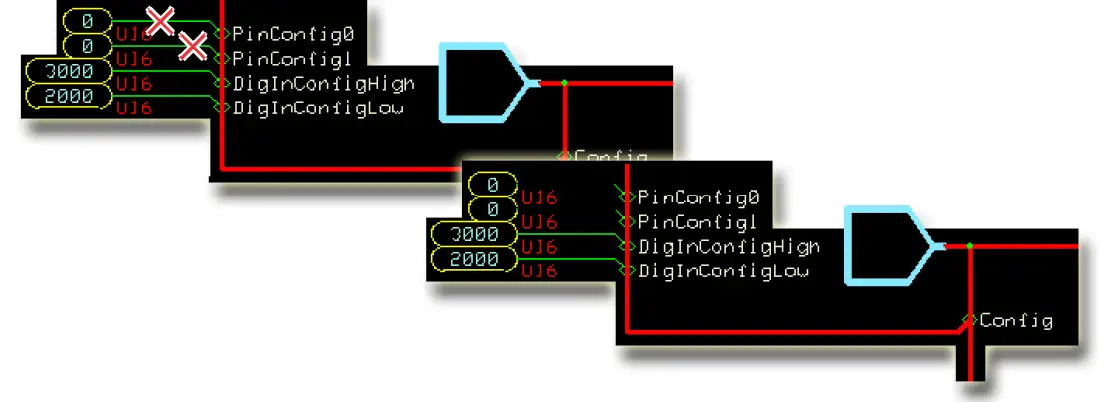
วิธีการกำหนดค่า DigAn สำหรับอินพุต DirIn
- ในเทมเพลต GUIDE ให้เข้าสู่หน้าอินพุต
- เข้าสู่หน้า DigAn ที่รับสัญญาณอินพุต
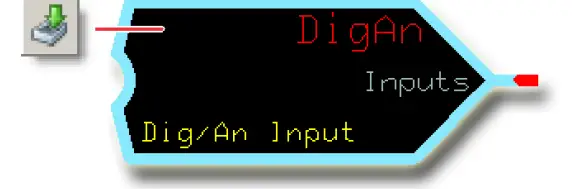
- ดำเนินการเปลี่ยนแปลงตามที่แสดงในรูปต่อไปนี้

การกำหนดค่าตัวควบคุม SC
การกำหนดค่าการป้อนข้อมูล
| ฟังก์ชันการป้อนบล็อก | ประเภทอินพุตที่เข้ากันได้ | การดำเนินการกำหนดค่า |
| ความเร็ว | เอ็มเอฟอิน* | ลบ:
|
| ผอ. | เอ็มเอฟอิน | ลบ:
|
| ดิแกน | ลบ:
|
* MFIn ที่คุณใช้จะต้องระบุว่า Dig/Ana/Freq.
† หากมี
วิธีการกำหนดค่า MFIn สำหรับอินพุต Spd
- ในเทมเพลต GUIDE ให้เข้าสู่หน้าอินพุต
- ป้อน MFIn ที่รับสัญญาณอินพุต
- ดำเนินการเปลี่ยนแปลงตามที่แสดงในรูปต่อไปนี้

วิธีการกำหนดค่า MFIn สำหรับอินพุต DirIn
- ในเทมเพลต GUIDE ให้เข้าสู่หน้าอินพุต

- ป้อน MFIn ที่รับสัญญาณอินพุต
- ดำเนินการเปลี่ยนแปลงตามที่แสดงในรูปต่อไปนี้

วิธีการกำหนดค่า DigAn สำหรับอินพุต DirIn
- ในเทมเพลต GUIDE ให้เข้าสู่หน้าอินพุต
- เข้าสู่ DigAn ที่รับสัญญาณอินพุต

- ดำเนินการเปลี่ยนแปลงตามที่แสดงในรูปต่อไปนี้
สินค้าที่เรานำเสนอ
- มอเตอร์แกนโค้ง
- ปั๊มและมอเตอร์ลูกสูบตามแนวแกนวงจรปิด
- จอแสดงผล
- พวงมาลัยพาวเวอร์แบบไฮดรอลิกไฟฟ้า
- ไฟฟ้าไฮดรอลิก
- พวงมาลัยเพาเวอร์ไฮดรอลิก
- ระบบบูรณาการ
- จอยสติ๊กและที่จับควบคุม
- ไมโครคอนโทรลเลอร์และซอฟต์แวร์
- ปั๊มลูกสูบแบบวงจรเปิด
- มอเตอร์วงโคจร
- คู่มือพลัส+1®
- วาล์วควบคุมสัดส่วน
- เซ็นเซอร์
- การบังคับเลี้ยว
- ไดรฟ์มิกเซอร์ขนส่ง
Danfoss Power Solutions เป็นผู้ผลิตและซัพพลายเออร์ระดับโลกด้านชิ้นส่วนไฮดรอลิกและอิเล็กทรอนิกส์คุณภาพสูง เราเชี่ยวชาญในการจัดหาเทคโนโลยีและโซลูชั่นล้ำสมัยที่เป็นเลิศในสภาพการทำงานที่รุนแรงของตลาดนอกทางหลวงเคลื่อนที่ ด้วยความเชี่ยวชาญในการใช้งานที่กว้างขวางของเรา เราทำงานอย่างใกล้ชิดกับลูกค้าของเราเพื่อให้มั่นใจถึงประสิทธิภาพที่ยอดเยี่ยมสำหรับยานพาหนะนอกทางหลวงหลากหลายประเภท
เราช่วยให้ OEM ทั่วโลกเร่งการพัฒนาระบบ ลดต้นทุน และนำยานพาหนะออกสู่ตลาดได้เร็วขึ้น
Danfoss – พันธมิตรที่แข็งแกร่งที่สุดของคุณในด้านระบบไฮดรอลิกแบบเคลื่อนที่
ไปที่ www.powersolutions.danfoss.com เพื่อทราบข้อมูลผลิตภัณฑ์เพิ่มเติม
ไม่ว่ายานพาหนะนอกทางหลวงจะใช้งานที่ไหน Danfoss ก็ทำงานเช่นกัน เราให้การสนับสนุนจากผู้เชี่ยวชาญทั่วโลกสำหรับลูกค้าของเรา เพื่อให้มั่นใจว่าโซลูชั่นที่ดีที่สุดที่เป็นไปได้เพื่อประสิทธิภาพที่โดดเด่น และด้วยเครือข่ายพันธมิตรบริการระดับโลกที่กว้างขวาง เรายังให้บริการระดับโลกที่ครอบคลุมสำหรับส่วนประกอบทั้งหมดของเรา
โปรดติดต่อตัวแทน Danfoss Power Solution ใกล้บ้านคุณ
โคมาทรอล
www.comatrol.com
ชวาร์ซมุลเลอร์-อินเวอร์เตอร์ www.schwarzmueller-inverter.com
ทูโรลล่า
www.turollaocg.com
วัลโมวา
www.valmova.com
ไฮโดรเกียร์
www.hydro-gear.com
ไดกิ้น-ซาวเออร์-แดนฟอสส์ www.daikin-sauer-danfoss.com
Danfoss
บริษัท Power Solutions (US) 2800 East 13th Street
เอมส์ IA 50010 สหรัฐอเมริกา
โทรศัพท์: +1 515 239 6000
Danfoss
Power Solutions GmbH & Co. OHG ครกamp 35
D-24539 Neumünster เยอรมนี โทรศัพท์: +49 4321 871 0
Danfoss
โซลูชันด้านพลังงาน ApS Nordborgvej 81
DK-6430 Nordborg เดนมาร์ก โทรศัพท์: +45 7488 2222
Danfoss
บริษัท พาวเวอร์ โซลูชั่นส์ (เซี่ยงไฮ้) จำกัด
อาคาร #22 เลขที่ 1000 Jin Hai Rd Jin Qiao เขตใหม่ผู่ตง เซี่ยงไฮ้ ประเทศจีน 201206 โทรศัพท์: +86 21 3418 5200
Danfoss จะไม่รับผิดชอบต่อข้อผิดพลาดที่อาจเกิดขึ้นในแค็ตตาล็อก โบรชัวร์ และสื่อสิ่งพิมพ์อื่นๆ Danfoss ขอสงวนสิทธิ์ในการเปลี่ยนแปลงผลิตภัณฑ์โดยไม่ต้องแจ้งให้ทราบล่วงหน้า นอกจากนี้ยังใช้กับผลิตภัณฑ์ตามคำสั่งซื้อโดยมีเงื่อนไขว่าการเปลี่ยนแปลงดังกล่าวสามารถทำได้โดยไม่ต้องเปลี่ยนแปลงตามข้อกำหนดเฉพาะที่ตกลงไว้แล้ว
เครื่องหมายการค้าทั้งหมดในเนื้อหานี้เป็นทรัพย์สินของบริษัทที่เกี่ยวข้อง Danfoss และโลโก้ Danfoss เป็นเครื่องหมายการค้าของ Danfoss A/S สงวนลิขสิทธิ์.
L1429328 • Rev AA • ธันวาคม 2014
www.danfoss.com
© Danfoss A/S, 2014
เอกสาร / แหล่งข้อมูล
 |
บล็อกฟังก์ชันทิศทางความเร็ว EMD ที่สอดคล้องกับ Danfoss [พีดีเอฟ] คู่มือการใช้งาน บล็อคฟังก์ชันทิศทางความเร็ว EMD ที่สอดคล้อง, บล็อคฟังก์ชันทิศทางความเร็ว, บล็อคฟังก์ชันทิศทาง, บล็อคฟังก์ชัน, บล็อค |



