![]() คู่มือการใช้งาน | EVAL-ADMT4000
คู่มือการใช้งาน | EVAL-ADMT4000
ยูจี-2069
การประเมิน ADMT4000
เซ็นเซอร์หมุนหลายทิศทางแบบ Zero Power
คุณสมบัติ
► คณะกรรมการประเมินผลเต็มรูปแบบสำหรับ ADMT4000
► รีเซ็ตแม่เหล็ก
► ควบคุมพีซีด้วย แพลตฟอร์มสาธิตระบบ SDP (อีวาลเอสดีพี-CS1Z)
► ซอฟต์แวร์พีซีสำหรับการกำหนดค่าและการวัดข้อมูล
เนื้อหาชุดประเมินผล
► บอร์ดประเมินผล EVAL-ADMT4000SD1Z
► แม่เหล็กกระตุ้น
► แม่เหล็กไดโพล
► ติดตั้งแบบเคลื่อนย้ายด้วยมือ
ฮาร์ดแวร์ที่จำเป็น
► การ อีวาล-SDP-CS1Z หรือบอร์ดควบคุม EVAL-SDP-CB1Z
► สาย USB มาพร้อมกับ EVAL-SDP-CS1Z
ต้องมีซอฟต์แวร์
► ซอฟต์แวร์ EVAL-ADMT4000SD1Z
คำอธิบายทั่วไป
ADMT4000 เป็นเซ็นเซอร์นับการหมุนแบบแม่เหล็กที่สามารถบันทึกจำนวนรอบของสนามแม่เหล็กภายนอกด้วยพลังงานเป็นศูนย์ ตำแหน่งสัมบูรณ์ รวมถึงจำนวนรอบ จะรายงานผ่านอินเทอร์เฟซต่อพ่วงแบบอนุกรม (SPI) บอร์ดประเมินผล EVAL-ADMT4000SD1Z ช่วยให้สามารถประเมินเซ็นเซอร์นับการหมุนแบบหลายรอบด้วยพลังงานเป็นศูนย์ของ ADMT4000 ได้ โดยจัดให้มีแพลตฟอร์มฮาร์ดแวร์ที่ยืดหยุ่นพร้อมอินเทอร์เฟซผู้ใช้แบบกราฟิก (GUI) ที่มาพร้อมกัน
EVAL-ADMT4000SD1Z นำเสนอ ADMT4000 ในรูปแบบแม่เหล็กปลายเพลา รูปที่ 1 ชุดประเมินผลประกอบด้วย EVAL-ADMT4000SD1Z และตัวกระตุ้นแม่เหล็กบนฐานแผงวงจรพิมพ์ (PCB) ในการใช้งานกับ GUI ที่ให้มา จำเป็นต้องใช้ EVAL-SDP-CS1Z (SDP-S) หรือ EVAL-SDP-CB1Z (SDP-B) ซึ่งเรียกอีกอย่างว่าบอร์ดควบคุม SDP ในคู่มือผู้ใช้ฉบับนี้
 รูปที่ 1 ระบบประเมินแม่เหล็กปลายเพลา ADMT4000 ประกอบด้วย EVAL-ADMT4000SD1Z
รูปที่ 1 ระบบประเมินแม่เหล็กปลายเพลา ADMT4000 ประกอบด้วย EVAL-ADMT4000SD1Z
อินเทอร์เฟซ SDP และ GUI ของ EVAL-ADMT4000SD1Z
โปรดดูหน้าสุดท้ายสำหรับข้อมูลสำคัญ คำเตือนและข้อกำหนดและเงื่อนไขทางกฎหมาย
การเริ่มต้น
ขั้นตอนการเริ่มต้นอย่างรวดเร็ว
บอร์ดประเมินผล EVAL-ADMT4000SD1Z รูปที่ 2 เชื่อมต่อกับ EVAL-SDP-CS1Z (SDP-S) or EVAL-SDP-CB1Z (เอสดีพี-บี)ในคู่มือผู้ใช้ฉบับนี้ SDP หมายถึงบอร์ดควบคุมใดบอร์ดหนึ่ง SDP คือลิงก์การสื่อสารระหว่างพีซีและ
EVAL-ADMT4000SD1Z และ SDP มอบ SPI ที่จำเป็นในการควบคุม ADMT4000 และส่งข้อมูลที่จับภาพได้โดยตรงไปยังพีซีโฮสต์
จะต้องติดตั้งซอฟต์แวร์และไดรเวอร์การประเมิน EVAL-ADMT4000SD1Z ก่อนที่จะเชื่อมต่อบอร์ดประเมินผลและบอร์ดควบคุม SDP เข้ากับพอร์ต USB ของพีซี เพื่อให้แน่ใจว่าระบบประเมินผลได้รับการจดจำอย่างถูกต้องเมื่อเชื่อมต่อ
หากต้องการเริ่มใช้ EVAL-ADMT4000SD1Z ให้ทำตามขั้นตอนต่อไปนี้:
- ติดตั้งซอฟต์แวร์ EVAL-ADMT4000SD1Z ดูข้อมูลเพิ่มเติมในส่วนการติดตั้งซอฟต์แวร์ EVAL-ADMT4000SD1Z
- เชื่อมต่อ SDP เข้ากับ EVAL-ADMT4000SD1Z
- เลื่อน EVAL-ADMT4000SD1Z เข้าไปในตัวยึดแม่เหล็ก เพื่อจัดตำแหน่งแม่เหล็กให้ตรงกับเซ็นเซอร์ ADMT4000 อย่างถูกต้อง ให้แน่ใจว่าได้ใส่ EVAL-ADMT4000SD1Z เข้าไปในตัวยึด PCB แม่เหล็กจนสุดแล้ว
- เชื่อมต่อ SDP เข้ากับพีซีโดยใช้สาย USB ที่ให้มา (USB Type A ถึง Mini-B)
- เปิดซอฟต์แวร์ EVAL-ADMT4000SD1Z คลิกปุ่ม Windows® เพื่อเปิดเมนู Start และรายการโปรแกรมของ Windows ไปที่ Analog Devices แล้วคลิก EVALADMT4000SDZ
 รูปที่ 2 การกำหนดค่าฮาร์ดแวร์ที่แสดงแม่เหล็กสาธิต
รูปที่ 2 การกำหนดค่าฮาร์ดแวร์ที่แสดงแม่เหล็กสาธิต
การประกอบและ EVAL-ADMT4000SD1Z
คณะกรรมการประเมินผล
EVAL-ADMT4000SD1Z ได้รับการออกแบบมาเพื่อให้ผู้ใช้สามารถเริ่มต้นใช้งานได้อย่างรวดเร็ว ADMT4000 โดยใช้ซอฟต์แวร์ประเมินผลและอินเทอร์เฟซ SDP ที่ให้มา
การใช้เฮดเดอร์บน EVAL-ADMT4000SD1Z ตารางที่ 1 ช่วยให้ผู้ใช้เชื่อมต่อไมโครโปรเซสเซอร์อื่นเพื่อพัฒนาซอฟต์แวร์ที่กำหนดเองได้ ส่วน PCB ที่ติดตั้ง ADMT4000 ได้รับการออกแบบมาให้ผู้ใช้สามารถติดตั้งบอร์ดในสภาพแวดล้อมที่มีพื้นที่จำกัดได้โดยการถอดส่วนแยกออกจากส่วนอินเทอร์เฟซ เฮดเดอร์มีให้ในส่วนแยกเพื่อให้ใช้งาน ADMT4000 กับไมโครโปรเซสเซอร์ได้
การตรวจจับแม่เหล็ก ADMT4000
ตำแหน่งของเซนเซอร์วัดมุม ADMT4000 เทียบกับจุดศูนย์กลางของแพ็คเกจ IC มีรายละเอียดอยู่ในแผ่นข้อมูล ADMT4000 ชุดแม่เหล็กจะจัดตำแหน่งแม่เหล็กที่ให้มาให้ตรงกับเซนเซอร์ ADMT4000 อย่างถูกต้องเมื่อใส่ PCB เข้าไปในชุดแม่เหล็กจนสุด ชุดประเมินผล EVAL-ADMT10SD5Z จะมาพร้อมกับแม่เหล็กแผ่นที่มีทิศทางตามเส้นผ่านศูนย์กลาง (เส้นผ่านศูนย์กลาง 4000 มม. และความสูง 1 มม.) แม่เหล็กนี้ผลิตจากซาแมเรียม (Sm)2 - คอลบอลต์ (Co)17 ที่มีค่าตกค้าง (Br) 950 mT ถึง 1020 mT
เอาท์พุต ADMT4000
ADMT4000 ส่งข้อมูลตำแหน่งเชิงมุม สถานะอุปกรณ์ และการวินิจฉัยผ่าน SPI
แหล่งจ่ายไฟ
EVAL-ADMT4000SD1Z ใช้แหล่งจ่ายไฟ 3.3 V จากอินเทอร์เฟซ SDP เพื่อจ่ายไฟให้กับส่วนประกอบทั้งหมดบนบอร์ด ยกเว้น LT3461ซึ่งได้รับพลังงานจาก USB 5 V LT3461 เป็นตัวแปลง DC/DC แบบเพิ่มแรงดันที่ใช้สำหรับวงจรรีเซ็ตแม่เหล็ก สามารถใช้แหล่งจ่ายไฟภายนอกได้โดยเชื่อมต่อผ่านเฮดเดอร์ต่างๆ ดังแสดงในรูปที่ 24 และรูปที่ 25 และอธิบายไว้ในตารางที่ 1
ส่วนแยกบอร์ด ADMT4000
EVAL-ADMT4000SD1Z มีส่วนแยกออก วงจรอินเทอร์เฟซ SDP สามารถถอดออกได้โดยการหักสะพานแคบของบอร์ดประเมินผลที่อยู่ตรงกลางของ EVALADMT4000SD1Z การถอดวงจรอินเทอร์เฟซ SDP ออกทำให้ผู้ใช้สามารถใช้บอร์ดประเมินผลแบบสแตนด์อโลนที่เล็กกว่าได้ ADMT4000 สามารถเชื่อมต่อกับระบบภายนอกที่จ่ายไฟและควบคุมอินเทอร์เฟซดิจิทัลได้
ตัวเชื่อมต่อชุดประเมินผล
ส่วนหัว PCB สำหรับเชื่อมต่อระบบภายนอกกับ EVAL-ADMT4000SD1Z แสดงอยู่ในตารางที่ 1
ตารางที่ 1 สรุปส่วนหัวของชุดประเมินผล EVAL-ADMT4000SD1Z
| ตัวระบุ | คำอธิบาย |
| P1 | ซ็อกเก็ตสำหรับบอร์ดอินเทอร์เฟซ SDP |
| P2 | ส่วนหัวสำหรับสัญญาณ RSTB, CNV, BUSY และ GPIO4 |
| P3 | ส่วนหัวสำหรับสัญญาณ SPI |
| P4 | ส่วนหัวที่อนุญาตให้เข้าถึง I²C, SPI, สถานะ และการควบคุมอินพุตและเอาต์พุตเอนกประสงค์ (GPIO) จากส่วนที่แยกออกไป |
| P5 | ส่วนหัวสำหรับคอยล์รีเซ็ตแม่เหล็ก |
| P6 | ส่วนหัวสำหรับขดลวดแบบดิฟเฟอเรนเชียลเพื่อวัดกระแสในขดลวดรีเซ็ตแม่เหล็ก |
| P7 | ส่วนหัวสำหรับการเข้าถึงสัญญาณหลักบนส่วนที่แยกออก |
ตารางที่ 2 ถึงตารางที่ 8 แสดงรายละเอียดการเชื่อมต่อกับส่วนหัวที่มีอยู่ใน EVAL-ADMT4000SD1Z
ตารางที่ 2 ซ็อกเก็ต P1 สำหรับบอร์ดควบคุมอินเทอร์เฟซ SDP
| หมายเลขพิน | การช่วยจำ | คำอธิบาย |
| 3, 4, 6, 11, 17, 23, 28, 36, 40, 46, 52, 58, 63, 69, 75, 81, 86, 93, 98, XNUMX, 104, 109, 115, 117, 118 |
ก.ย.ด. | ระบบกราวด์ |
| 5 | ยูเอสบี_วี | แหล่งจ่ายไฟ 5 V จากพอร์ต USB ของพีซีที่เชื่อมต่อ |
| 38 | เอสพีไอ ซีเอสบี | เลือกชิป SPI สำหรับ ADMT4000, เลือกชิป SDP พอร์ต C |
| 43 | GPIO3_ACALC | สถานะการคำนวณ GPIO หรือมุม |
| 44 | คอยล์_อาร์เอส | รีเซ็ตขดลวดแม่เหล็ก-เปิดใช้งานการรีเซ็ต |
| 45 | GPIO0_ไม่ว่าง | เอาท์พุตสถานะ GPIO หรือสถานะไม่ว่าง |
| 46 | วี_เอ็น | เปิดใช้งาน VDD สำหรับ ADMT4000 |
| 56 | EEPROM_A0 | ที่อยู่ A0 ของตัวระบุบอร์ดหน่วยความจำแบบอ่านอย่างเดียวที่สามารถลบและตั้งโปรแกรมได้ด้วยไฟฟ้า (EEPROM) |
| 74 | อาร์เอสทีบี | ฟังก์ชั่นรีเซ็ต ADMT4000 |
| 76 | GPIO1_ซีเอ็นวี | GPIO หรือเริ่มการแปลง |
| 77 | บูสท์_EN | เปิดใช้งานวงจรบูสต์คอยล์รีเซ็ตแม่เหล็ก |
| 78 | GPIO4 | GPIO หรือสถานะความผิดพลาด |
| 79 | ไอทูซี SCL_2 | นาฬิกาไอ²C |
| 80 | ไอทูซีเอสดีเอ_2 | ข้อมูล I²C |
| 82 | สปิริต สลค. | นาฬิกา SPI |
| 83 | เอสพีไอ เอสดีโอ | SPI รองข้อมูลออก |
| 84 | เอสพีไอ เอสดีไอ | SPI ข้อมูลรองใน |
| 85 | SPI_SEL_A_N | เลือกชิป SPI สำหรับตัวขยาย GPIO เลือกชิป SDP A |
| 116 | 3V3 | แหล่งจ่ายไฟหลักสำหรับ ADMT4000 และอุปกรณ์สนับสนุน |
ตารางที่ 3 ส่วนหัว P2 สำหรับสัญญาณ RSTB, CNV, BUSY และ GPIO4
| หมายเลขพิน | การช่วยจำ | คำอธิบาย |
| 1 | อาร์เอสทีบี | ฟังก์ชั่นรีเซ็ต ADMT4000 |
| 2 | GPIO1_ซีเอ็นวี | GPIO1 และการแปลงเริ่มต้น |
| 3 | GPIO0_ไม่ว่าง | GPIO0 และสถานะเอาท์พุตไม่ว่าง |
| 4 | GPIO4 | GPIO4 |
| 5 | ก.ย.ด. | ระบบกราวด์ |
ตารางที่ 4. ส่วนหัว P3 สำหรับ SPI
| หมายเลขพิน | การช่วยจำ | คำอธิบาย |
| 1 | แผนผัง I2C | นาฬิกา I2C |
| 2 | เอสพีไอ เอสดีโอ | ข้อมูล SPI ออก |
| 3 | เอสพีไอ เอสดีไอ | ข้อมูล SPI ใน |
| 4 | เอสพีไอ ซีเอสบี | เลือกชิป SPI สำหรับ ADMT4000, เลือกชิป SDP พอร์ต C |
ตารางที่ 5. ส่วนหัวอินเทอร์เฟซภายนอก P4
| หมายเลขพิน | การช่วยจำ | คำอธิบาย |
| 1 | 3V3 | แหล่งจ่ายหลักสำหรับ ADMT4000 และอุปกรณ์สนับสนุน |
| 2 | ก.ย.ด. | ระบบกราวด์ |
| 3 | 5V | แหล่งจ่ายไฟสำหรับคอยล์รีเซ็ตแม่เหล็ก |
| 4 | สปิริต สลค. | นาฬิกา SPI |
| 5 | เอสพีไอ เอสดีโอ | ข้อมูล SPI ออก |
| 6 | เอสพีไอ เอสดีไอ | ข้อมูล SPI ใน |
| 7 | เอสพีไอ ซีเอสบี | เลือกชิป SPI |
| 8 | อาร์เอสทีบี | ฟังก์ชั่นรีเซ็ต ADMT4000 |
| 9 | GPIO1_ซีเอ็นวี | GPIO1 หรือเริ่มการแปลง |
| 10 | GPIO0_ไม่ว่าง | GPIO0 หรือสถานะเอาท์พุตไม่ว่าง |
| 11 | GPIO4 | GPIO4 |
| 12 | GPIO5_BOOTLOA ดี | GPIO5 หรือสถานะบูตโหลด |
| 13 | GPIO3_ACALC | GPIO3 หรือสถานะการคำนวณมุม |
| 14 | ไอทูซีเอสดีเอ_2 | ข้อมูล I2C |
| 15 | ไอทูซี SCL_2 | นาฬิกา I2C |
| 16 | วี_เอ็น | เปิดใช้งาน VDD สำหรับ ADMT4000 |
| 17 | บูสท์_EN | เปิดใช้งานวงจรบูสต์คอยล์รีเซ็ตแม่เหล็ก |
| 18 | คอยล์_อาร์เอส | รีเซ็ตขดลวดแม่เหล็ก-เปิดใช้งานการรีเซ็ต |
ตารางที่ 6 ส่วนหัว P5 สำหรับคอยล์รีเซ็ตแม่เหล็ก
| หมายเลขพิน | การช่วยจำ | คำอธิบาย |
| 1 | คอยล์+ | ขั้วบวกของคอยล์รีเซ็ตแม่เหล็ก |
| 2 | คอยล์− | ขั้วลบของคอยล์รีเซ็ตแม่เหล็ก |
ตารางที่ 7 ส่วนหัว P6 สำหรับคอยล์แบบดิฟเฟอเรนเชียลเพื่อวัดกระแสในคอยล์รีเซ็ตแม่เหล็ก
| หมายเลขพิน | การช่วยจำ | คำอธิบาย |
| 1 | คอยล์+ | ตัวต้านทานตรวจจับด้านสูงtage |
| 2 | คอยล์++ | ตัวต้านทานตรวจจับด้านต่ำtage |
ตารางที่ 8 ส่วนหัว P7 เพื่อให้สามารถเข้าถึง I²C, SPI, สถานะ และ GPIO ควบคุมจากส่วนที่แยกออกไป
| หมายเลขพิน | การช่วยจำ | คำอธิบาย |
| 1 | วีดีดี | แหล่งจ่ายไฟตรงไปยัง ADMT4000 |
| 2 | 5V | แหล่งจ่ายไฟ 5 V สำหรับระดับ VDRIVE ทางเลือก |
| 3 | GPIO2 | จีพีไอโอ |
| 4 | I2C SCLK_ไอ | นาฬิกา SPI |
| 5 | SPI สโดว์ไอ | ข้อมูล SPI ออก |
| 6 | SPI SDI_ไอ | ข้อมูล SPI ใน |
| 7 | เอสพีไอ ซีเอสบี_ไอ | เลือกชิป SPI สำหรับ ADMT4000 |
| 8 | RSTB_ฉัน | ฟังก์ชั่นรีเซ็ต ADMT4000 |
| 9 | ซีเอ็นวี_ไอ | การแปลงเริ่มต้น |
| 10 | GPIO0_ไม่ว่าง | เอาท์พุตสถานะ GPIO หรือสถานะไม่ว่าง |
| 11 | GPIO4 | จีพีไอโอ |
| 12 | GPIO5_บูตโหลด | GPIO หรือสถานะบูตโหลด |
| 13 | GPIO3_ACALC | สถานะการคำนวณ GPIO หรือมุม |
| 14 | ก.ย.ด. | ระบบกราวด์ |
| 15 | วีอาร์ไดฟ์ | แหล่งจ่ายไฟ ADMT4000 GPIO |
การติดตั้งซอฟต์แวร์
ส่วนการติดตั้งซอฟต์แวร์ EVAL-ADMT4000SD1Z และการติดตั้งไดรเวอร์บอร์ดแพลตฟอร์มการสาธิตระบบจะสรุปกระบวนการติดตั้งซอฟต์แวร์โดยถือว่าไม่ได้มีการติดตั้งไดรเวอร์ SDP มาก่อน
การติดตั้ง EVAL-ADMT4000SD1Z ซอฟต์แวร์
ในการติดตั้งซอฟต์แวร์ EVAL-ADMT4000SD1Z ให้ทำตามขั้นตอนต่อไปนี้:
- เรียกใช้ EVAL-ADMT4000SDZ.exe file จัดหาให้บน ADMT4000 หน้าผลิตภัณฑ์เพื่อติดตั้งซอฟต์แวร์ EVAL-ADMT4000SDZ หากกล่องโต้ตอบปรากฏขึ้นเพื่อขออนุญาตให้โปรแกรมทำการเปลี่ยนแปลงในพีซี ให้คลิก ใช่
- เลือกตำแหน่งที่จะติดตั้งซอฟต์แวร์ จากนั้นคลิกถัดไป (ดูรูปที่ 3)
 รูปที่ 3 เส้นทางการติดตั้ง ADMT4000
รูปที่ 3 เส้นทางการติดตั้ง ADMT4000 - จากนั้นจะแสดงข้อมูลสรุปการติดตั้ง คลิกถัดไปเพื่อดำเนินการต่อ (ดูรูปที่ 4)
 รูปที่ 4 สรุปการติดตั้ง ADMT4000
รูปที่ 4 สรุปการติดตั้ง ADMT4000 - เมื่อการติดตั้งเสร็จสิ้น คลิก เสร็จสิ้น (ดูรูปที่ 5)
 รูปที่ 5 การติดตั้ง ADMT4000 เสร็จสมบูรณ์
รูปที่ 5 การติดตั้ง ADMT4000 เสร็จสมบูรณ์
การติดตั้งไดร์เวอร์บอร์ดแพลตฟอร์มสาธิตระบบ
หลังจากการติดตั้งซอฟต์แวร์ EVAL-ADMT4000SD1Z เสร็จสิ้น หน้าต่างต้อนรับจะแสดงขึ้น (ดูรูปที่ 6) เพื่อการติดตั้งไดรเวอร์ SDP
ดำเนินการตามขั้นตอนต่อไปนี้เพื่อติดตั้งไดรเวอร์ SDP:
- เมื่อถอดบอร์ด SDP ออกจากพอร์ต USB ของพีซีแล้ว ตรวจสอบให้แน่ใจว่าปิดแอปพลิเคชันอื่นทั้งหมดแล้ว จากนั้นคลิก ถัดไป
 รูปที่ 6 การติดตั้งแพลตฟอร์ม SDP
รูปที่ 6 การติดตั้งแพลตฟอร์ม SDP - จากนั้นข้อตกลงอนุญาตสิทธิ์การใช้งานจะปรากฏขึ้น อ่านข้อตกลง เลือก ฉันยอมรับข้อตกลงอนุญาตสิทธิ์การใช้งาน แล้วคลิก ถัดไป แล้วคลิก ฉันยอมรับ (ดูรูปที่ 7)
 รูปที่ 7 ใบอนุญาตแพลตฟอร์ม SDP
รูปที่ 7 ใบอนุญาตแพลตฟอร์ม SDP - จากนั้นหน้าต่าง Choose Components จะปรากฏขึ้นพร้อมกับส่วนประกอบเริ่มต้นที่เลือกไว้แล้ว คลิก Next (ดูรูปที่ 8)
 รูปที่ 8 การเลือกส่วนประกอบ SDP
รูปที่ 8 การเลือกส่วนประกอบ SDP - เลือกตำแหน่งที่จะติดตั้งไดรเวอร์ จากนั้นคลิกติดตั้ง (ดูรูปที่ 9)
 รูปที่ 9 โฟลเดอร์การติดตั้งแพลตฟอร์ม SDP
รูปที่ 9 โฟลเดอร์การติดตั้งแพลตฟอร์ม SDP - เพื่อให้การติดตั้งไดรเวอร์เสร็จสมบูรณ์ ให้คลิก ปิด ซึ่งจะเป็นการปิดตัวช่วยติดตั้ง (ดูรูปที่ 10)
 รูปที่ 10 การติดตั้ง SDP เสร็จสมบูรณ์
รูปที่ 10 การติดตั้ง SDP เสร็จสมบูรณ์ - จากนั้นการติดตั้งไดรเวอร์จะติดตั้งไดรเวอร์ Windows หากระบบความปลอดภัยของ Windows ขออนุญาตติดตั้ง ให้คลิก Install (ดูรูปที่ 11)
 รูปที่ 11 การติดตั้งไดรเวอร์ SDP
รูปที่ 11 การติดตั้งไดรเวอร์ SDP
การกำหนดค่า EEPROM
EEPROM บนบอร์ดลูก EVAL-ADMT4000SD1Z จะจัดเก็บประเภทของบอร์ดลูกและตั้งค่าจากโรงงาน หากไม่ได้ตั้งโปรแกรม EEPROM หรือมีการเชื่อมต่อบอร์ดลูกที่ไม่ถูกต้อง กล่องโต้ตอบดังแสดงในรูปที่ 12 จะปรากฏขึ้น
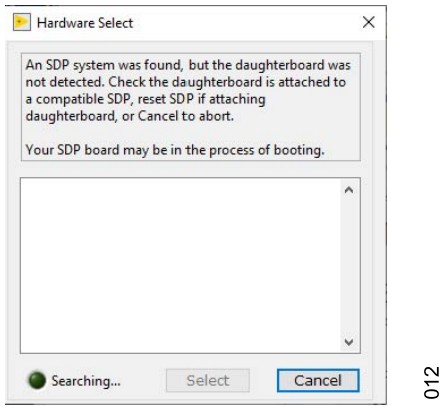 รูปที่ 12 หน้าต่างป๊อปอัปที่ระบุว่าบอร์ดลูกที่ไม่คาดคิดเชื่อมต่อกับ SDP หรือ EVAL-ADMT4000SD1ZEEPROM ถูกตั้งโปรแกรมอย่างไม่ถูกต้อง
รูปที่ 12 หน้าต่างป๊อปอัปที่ระบุว่าบอร์ดลูกที่ไม่คาดคิดเชื่อมต่อกับ SDP หรือ EVAL-ADMT4000SD1ZEEPROM ถูกตั้งโปรแกรมอย่างไม่ถูกต้อง
ในการกำหนดค่า EEPRPOM ให้เปิดยูทิลิตี้ SDP EEPROM Programmer (.NET) ซึ่งดาวน์โหลดได้จาก อุปกรณ์แอนะล็อก, บริษัท อิงค์ เซลส์.
.dat ที่เหมาะสม file ยังสามารถใช้ได้ตามคำขอเพื่อกำหนดค่าโหลด File แท็บดังที่แสดงในรูปที่ 13 ซึ่งใช้ที่อยู่ 54
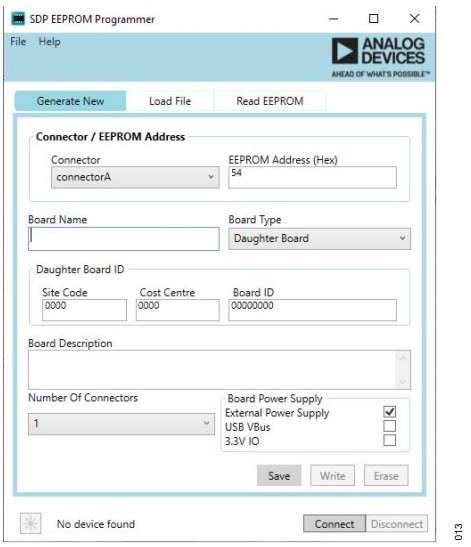 รูปที่ 13 ยูทิลิตี้การกำหนดค่า SDP EEPROM
รูปที่ 13 ยูทิลิตี้การกำหนดค่า SDP EEPROM
การทำงานของซอฟต์แวร์ EVAL-ADMT4000SD1Z
เดอะโอเวอร์view ส่วนต่างๆ ของ GUI การประเมิน ADMT4000 และการเริ่มต้นซอฟต์แวร์ EVAL-ADMT4000SD1Z อธิบายถึงวิธีการใช้งาน GUI ที่ให้มาในซอฟต์แวร์ EVAL-ADMT4000SD1Z
การเริ่มต้น EVAL-ADMT4000SD1Z ซอฟต์แวร์
หลังจากเสร็จสิ้นขั้นตอนในส่วนการติดตั้งซอฟต์แวร์แล้ว ให้เปิดซอฟต์แวร์ EVAL-ADMT4000SD1Z ดังต่อไปนี้:
► เชื่อมต่อ SDP ด้วย EVAL-ADMT4000SD1Z เข้ากับพีซีโดยใช้สาย USB ที่ให้มา
► คลิกไอคอน Windows เพื่อเปิดเมนู Start และรายการโปรแกรมของ Windows เลือก Analog Devices/EVAL-ADMT4000SD1Z
► หากติดตั้ง GUI ประเมินผล ADMT4000 สำเร็จและตรวจพบ EVAL-ADMT4000SD1Z ซอฟต์แวร์ประเมินผล EVALADMT4000SD1Z จะเปิดขึ้นโดยอัตโนมัติ (ดูรูปที่ 14) ชื่อบอร์ดประเมินผลจะแสดงที่แผงด้านหน้าของ GUI (ดูป้ายกำกับ 1 ในรูปที่ 14)
 รูปที่ 14 GUI การประเมิน ADMT4000 แสดงการเชื่อมต่อ
รูปที่ 14 GUI การประเมิน ADMT4000 แสดงการเชื่อมต่อ
ชุดประเมินผล EVALADMT4000SD1Z
► หากระบบประเมินผล EVAL-ADMT4000SD1Z ไม่ได้เชื่อมต่อกับพอร์ต USB ผ่าน SDP ชื่อของบอร์ดประเมินผลจะไม่ปรากฏบนแผงด้านหน้า หลังจากนั้นไม่กี่วินาที หน้าต่างการเลือกฮาร์ดแวร์จะปรากฏขึ้น (ดูรูปที่ 15) เชื่อมต่อระบบประเมินผล EVAL-ADMT4000SD1Z เข้ากับพอร์ต USB ของพีซีและรอสักครู่ หน้าต่างการเลือกฮาร์ดแวร์จะแสดงชุดประเมินผล SDP ที่เชื่อมต่อกับพีซี เลือก EVAL-ADMT4000SD1Z แล้วคลิกเลือก (ดูรูปที่ 16)
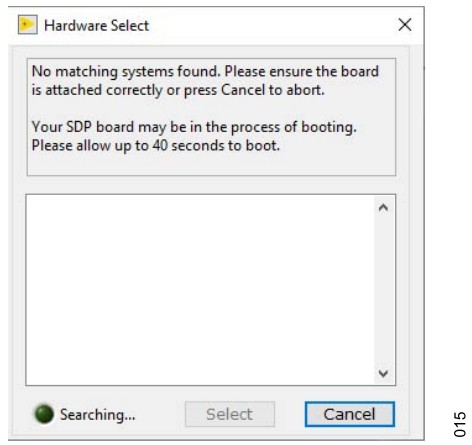 รูปที่ 15 หน้าต่างการเลือกฮาร์ดแวร์ที่ปรากฏขึ้นเมื่อ GUI เริ่มทำงาน
รูปที่ 15 หน้าต่างการเลือกฮาร์ดแวร์ที่ปรากฏขึ้นเมื่อ GUI เริ่มทำงาน
หากไม่มี EVAL-ADMT4000SD1Z เชื่อมต่อกับพีซี
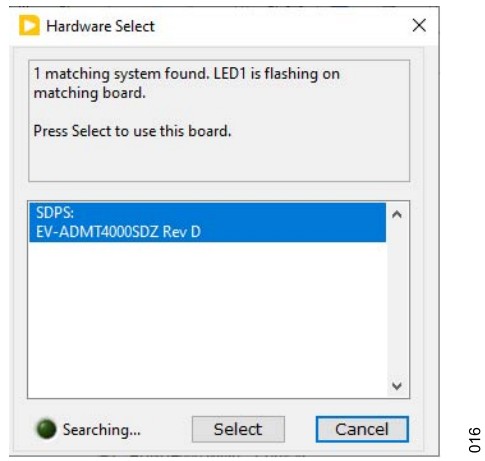 รูปที่ 16 หน้าต่างเลือกฮาร์ดแวร์ที่ปรากฏขึ้นเมื่อ
รูปที่ 16 หน้าต่างเลือกฮาร์ดแวร์ที่ปรากฏขึ้นเมื่อ
EVALADMT4000SD1Z เชื่อมต่อกับพีซี
► เมื่อเริ่มต้น GUI การประเมิน ADMT4000 จะเริ่มรับและแสดงข้อมูลจากระบบโดยอัตโนมัติ ADMT4000การตั้งค่าลำดับเริ่มต้นถูกกำหนดไว้ในการกำหนดค่าที่ให้มา file C:\โปรแกรม Files\Analog Devices\EVAL-ADMT4000SDZ 0.0.0\dataADMT4000 Config.csv หากต้องการเริ่ม GUI ในการกำหนดค่าที่ผู้ใช้กำหนด ผู้ใช้จะต้องปรับเปลี่ยนการกำหนดค่า file.
เกินVIEW ของการประเมิน ADMT4000 กุ้ยช่าย
GUI สำหรับการประเมิน ADMT4000 มีแท็บชุดหนึ่งเพื่อให้ผู้ใช้สามารถประเมินคุณสมบัติของ ADMT4000 ได้ แท็บ GUI จะแสดงและติดป้ายกำกับไว้ในรูปที่ 17 ตารางที่ 9 จะแสดงฟังก์ชันหลักที่เข้าถึงได้ในแท็บต่างๆ
 รูปที่ 17 เมนูแท็บ GUI
รูปที่ 17 เมนูแท็บ GUI
ตาราง 9. คำอธิบายแท็บ GUI การประเมิน ADMT4000 พร้อมป้ายกำกับ
| ฉลาก ตัวเลข | ชื่อแท็บ | คำอธิบาย |
| 1 | การรวบรวมข้อมูล | แท็บการรวบรวมข้อมูลเป็นแท็บผู้ใช้หลักสำหรับการตรวจสอบเอาท์พุตจาก ADMT4000 และสำหรับการกำหนดค่าลำดับการได้มา |
| 2 | คุณประโยชน์ | แท็บยูทิลิตี้จะแสดงรายละเอียดสถานะของการลงทะเบียน FAULT และอนุญาตให้อัปโหลด ของการกำหนดค่าผู้ใช้และการบันทึกคำสั่ง SPI |
| 3 | การสอบเทียบ | แท็บการสอบเทียบเป็นที่ที่ผู้ใช้กำหนดค่าการสอบเทียบในระดับระบบ |
แท็บการรวบรวมข้อมูล
แท็บการรวบรวมข้อมูล (ดูรูปที่ 18) จะแสดงการวัดเซนเซอร์และให้การเข้าถึงการวินิจฉัยเซนเซอร์
 รูปที่ 18 แท็บการรวบรวมข้อมูล
รูปที่ 18 แท็บการรวบรวมข้อมูล
ตารางที่ 10 แสดงคำอธิบายของป้ายกำกับในแท็บการรวบรวมข้อมูล รูปที่ 18
ตารางที่ 10 คำอธิบายสำหรับป้ายแท็บการรวบรวมข้อมูล
| ฉลาก ตัวเลข | ชื่อฉลาก | คำอธิบาย |
| 1 | การควบคุมลำดับ | การควบคุมสำหรับเลือกการตั้งค่าลำดับการวัด |
| 2 | เริ่มหรือหยุดชั่วคราว | เริ่มลำดับที่กำหนดค่าไว้หรือหยุดลำดับปัจจุบัน |
| 3 | รีเซ็ต | ดำเนินการรีเซ็ตแม่เหล็กโดยมีคอยล์ที่รวมอยู่ในชุดประเมิน |
| 4 | ไซน์และโคไซน์ | พล็อตเอาต์พุตของไซน์เทียบกับเอาต์พุตของโคไซน์ |
| 5 | บันทึกข้อมูล | ช่วยให้สามารถบันทึกข้อมูลของสampเลส. |
| 6 | อุณหภูมิ (°C) | เป็นการแสดงอุณหภูมิของเซนเซอร์ภายใน |
| 7 | การวัดล่าสุด | แสดงมุมล่าสุด จำนวนรอบ และตัวนับเฟรม SPI การระบุอุปกรณ์จะได้รับการอัปเดตเมื่อเริ่มต้นเท่านั้น |
| 8 | ข้อมูลที่ถูกจับ | พื้นที่แปลงสampข้อมูล LED แสดงจำนวนการเลี้ยว มุม และค่าการวินิจฉัยที่พร้อมใช้งาน |
| 9 | แสดงความยาว | ควบคุมจำนวนจุดข้อมูลที่แสดงในพล็อตข้อมูลที่จับได้ |
| 10 | พลัง | . ควบคุมการใช้ไฟฟ้าให้กับ ADMT4000 |
| 11 | หยุด | ออกจาก GUI |
| 12 | สถานะอุปกรณ์ | ไฟแสดงสถานะจะเปลี่ยนเป็นสีแดงหากตรวจพบแฟล็กข้อผิดพลาดบนเฟรม SPI (ไม่ได้ใช้งานสำหรับการใช้งานในอุตสาหกรรม) ตรวจพบข้อผิดพลาดในการตรวจสอบแบบซ้ำซ้อนแบบวนซ้ำ (CRC) บนเฟรม SPI หรือมีการตั้งค่าแฟล็กข้อผิดพลาดในรีจิสเตอร์ FAULT |
| 13 | ไอคอนช่วยเหลือ (?) | อดีตampไอคอนวิธีใช้ที่ให้ข้อมูลเพิ่มเติมแก่ผู้ใช้ |
การควบคุมลำดับ
พื้นที่ควบคุมลำดับในแท็บการรับข้อมูลช่วยให้ผู้ใช้สามารถกำหนดค่าโหมดการรับข้อมูล ADMT4000 ได้ดังต่อไปนี้:
► ภายในเมนูแบบเลื่อนลงประเภทการแปลง ให้เลือกการซื้อภาพแบบต่อเนื่องหรือแบบครั้งเดียว
► ในเมนูแบบเลื่อนลงของ CNV Source เลือกจุดเริ่มต้นการแปลงที่สร้างโดยซอฟต์แวร์หรือ CNV ที่สร้างจากภายนอก สัญญาณ CNV ภายนอกจะสร้างขึ้นโดยบอร์ดควบคุม SDP
► ภายในเมนูแบบเลื่อนลงการแปลงการซิงโครไนซ์ สามารถใช้แหล่งข้อมูลภายนอกเพื่อซิงโครไนซ์การวัดมุมได้
► ภายในเมนูแบบเลื่อนลงของตัวกรองมุม ให้เปิดใช้งานหรือปิดใช้งานตัวกรองมุมการตอบสนองต่อแรงกระตุ้นไม่สิ้นสุด (IIR)
► ภายในเมนูแบบเลื่อนลงฮาร์มอนิกที่ 8 เลือกค่าสัมประสิทธิ์ฮาร์มอนิกที่ 8 ที่ตั้งจากโรงงานหรือค่าสัมประสิทธิ์ที่ผู้ใช้กำหนดในคอนฟิกูเรชัน ADMT4000 Config.csv file.
การทำงานของซอฟต์แวร์ EVAL-ADMT4000SD1Z
เริ่ม
ปุ่ม Start ใช้เพื่อเริ่มหรือหยุดลำดับการวัดชั่วคราว โปรดทราบว่าป้ายกำกับบนปุ่ม Start จะเปลี่ยนเป็น Pause เมื่อกำลังดำเนินการรับข้อมูล
รีเซ็ต
ปุ่ม RESET จะเริ่มการรีเซ็ตแบบแม่เหล็กของเซ็นเซอร์นับรอบโดยใช้คอยล์บน EVAL-ADMT4000SD1Z ดังต่อไปนี้:
► เริ่มต้นลำดับการแปลง
► คลิก รีเซ็ต
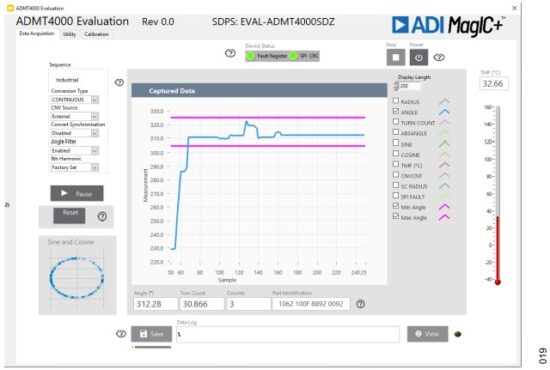 รูปที่ 19 การแสดงข้อมูลที่จับได้ซึ่งแสดงมุมที่ได้มา (สีน้ำเงิน) และมุมสูงสุดและต่ำสุดของเป้าหมาย (สีแดงอมม่วง) สำหรับการรีเซ็ตแม่เหล็ก
รูปที่ 19 การแสดงข้อมูลที่จับได้ซึ่งแสดงมุมที่ได้มา (สีน้ำเงิน) และมุมสูงสุดและต่ำสุดของเป้าหมาย (สีแดงอมม่วง) สำหรับการรีเซ็ตแม่เหล็ก
► จากนั้นจอแสดงข้อมูลที่จับได้จะแสดงการวัดมุมและเป้าหมายมุมต่ำสุดและมุมสูงสุด (ดูรูปที่ 19)
► หมุนแม่เหล็กจนกระทั่งการวัดมุมอยู่ภายในขีดจำกัดที่แสดงในรูปที่ 19
► คลิก รีเซ็ต ป้ายกำกับ 3 ในรูปที่ 18
► เมื่อใช้งานในรูปแบบการแปลง ONE SHOT ตัวระบุจำนวนรอบจะแสดงค่าที่ใกล้เคียงกับ 46 โปรดทราบว่าค่าที่แน่นอนจะขึ้นอยู่กับมุมที่แน่นอนของแม่เหล็ก
► เมื่อใช้งานประเภทการแปลงต่อเนื่อง ผู้ใช้จะต้องเริ่มลำดับการแปลงใหม่อีกครั้งเพื่อสังเกตจำนวนรอบที่รีเซ็ต
► หมุนแม่เหล็กทวนเข็มนาฬิกาเพื่อดูจำนวนรอบที่ลดลง
ไซน์และโคไซน์
พื้นที่นี้แสดงขนาดของการวัดไซน์เทียบกับโคไซน์
บันทึกข้อมูล
พื้นที่บันทึกข้อมูล รูปที่ 20 ช่วยให้ผู้ใช้สามารถบันทึกข้อมูลที่รวบรวมไว้ในบันทึก NI TDMS file ดังต่อไปนี้:
 รูปที่ 20 พื้นที่บันทึกข้อมูลที่บันทึกไว้ของแท็บการรวบรวมข้อมูล
รูปที่ 20 พื้นที่บันทึกข้อมูลที่บันทึกไว้ของแท็บการรวบรวมข้อมูล
► สามารถเริ่มฟังก์ชันบันทึกได้ก่อนหรือระหว่างลำดับการเก็บข้อมูล โปรดทราบว่าฟังก์ชันนี้จะไม่บันทึกข้อมูลใดๆ ที่รวบรวมโดย GUI ก่อนที่ฟังก์ชันบันทึกจะเปิดใช้งาน
► คลิกบันทึก (ป้ายกำกับ 1 ในรูปที่ 20) จากนั้นหน้าต่างจะปรากฏขึ้น ผู้ใช้สามารถแก้ไขป้ายกำกับได้ file ตั้งชื่อและบันทึกตำแหน่งภายในหน้าต่างนี้ ตรวจสอบให้แน่ใจว่า file ส่วนขยายคือ .tdms
► การ file เส้นทางสำหรับข้อมูลที่บันทึกจะแสดงในตัวบ่งชี้บันทึกข้อมูล (ป้ายกำกับ 2 ในรูปที่ 20) และตัวบ่งชี้การบันทึกใช้งานอยู่ (ป้ายกำกับ 3 ในรูปที่ 20) จะเปลี่ยนจากสีเขียวเข้มเป็นสีเขียวอ่อน
► หากต้องการหยุดฟังก์ชันบันทึก ให้คลิก บันทึก (ป้ายชื่อ 1 ในรูปที่ 20)
► ตัวบ่งชี้การบันทึกใช้งานอยู่ (ฉลาก 3 ในรูปที่ 20) จะเปลี่ยนจากสีเขียวอ่อนเป็นสีเขียวเข้ม
► เพื่อเพิ่มประสิทธิภาพการทำงานของ TDMS fileGUI จะดีแฟร็กโดยอัตโนมัติ fileและความคืบหน้าของกระบวนการดีแฟร็กเมนต์จะแสดงอยู่ในแถบความคืบหน้า (ดูป้ายกำกับ 4 ในรูปที่ 20)
► เพื่อเปิด file ตำแหน่งที่ตั้ง คลิก VIEW (ฉลาก 5 ในรูปที่ 20)
ระบบ TDMS file สามารถนำเข้าไปยัง Excel ได้โดยใช้ NI TDM Excel Add-In สำหรับ Microsoft Excel ฟรี ซึ่งสามารถดาวน์โหลดได้จาก NI webไซต์. บันทึก file จัดเก็บการกำหนดค่าอุปกรณ์ ข้อมูลที่วัด และสถานะความผิดพลาดสำหรับการรวบรวมข้อมูลแต่ละครั้ง
เซ็นเซอร์วัดอุณหภูมิ
รายงานอุณหภูมิที่จุดเชื่อมต่อทั้งในรูปแบบจอแสดงผลแบบเทอร์โมมิเตอร์และแบบดิจิทัล
การวัดล่าสุด
ข้อมูลมุมและจำนวนรอบสุดท้ายจะแสดงในพื้นที่การวัดล่าสุดของแท็บการรวบรวมข้อมูล (ป้ายกำกับ 7 ในรูปที่ 18)
► ตัวระบุมุมจะแสดงข้อมูลมุมเป็นองศา
► ตัวระบุจำนวนรอบจะแสดงจำนวนรอบ
► ตัวระบุตัวนับจะแสดงจำนวนเฟรม SPI
► ตัวบ่งชี้การระบุชิ้นส่วนจะแสดงตัวระบุเฉพาะของอุปกรณ์ที่เชื่อมต่อกับ EVAL-ADMT4000SD1Z
ข้อมูลที่ถูกจับ
ส่วนข้อมูลที่บันทึก (ป้ายกำกับ 8 ในรูปที่ 18) จะแสดงประวัติการรวบรวมข้อมูล ช่องกาเครื่องหมายบนคำอธิบายแผนภูมิสามารถควบคุมการมองเห็นรายการข้อมูลบนแผนภูมิได้ โปรดทราบว่าข้อมูลที่บันทึกประกอบด้วยข้อมูลทั้งหมดที่แสดงในคำอธิบายแผนภูมิโดยไม่คำนึงถึง
สถานะของช่องกาเครื่องหมายข้างชื่อพล็อต
แสดงความยาว
การควบคุมความยาวการแสดงผล (ป้ายกำกับ 9 ในรูปที่ 18) ใช้เพื่อควบคุมจำนวนจุดข้อมูลที่แสดงในพล็อตข้อมูลที่จับได้
พลัง
คลิกพลังงาน (ป้ายกำกับ 10 ในรูปที่ 18) เพื่อควบคุมโหมดพลังงานของ ADMT4000.
 รูปที่ 21 ปุ่มเปิด/ปิด
รูปที่ 21 ปุ่มเปิด/ปิด
GUI พยายามที่จะอ่านจาก ADMT4000 โดยไม่คำนึงถึงสถานะพลังงาน
หยุด
คลิกหยุด (ป้ายชื่อ 11 ในรูปที่ 18) เพื่อหยุดและออกจาก GUI
สถานะอุปกรณ์
ไฟแสดงสถานะความผิดพลาดสามตัวต่อไปนี้ (ป้ายกำกับ 13 ในรูปที่ 18) ภายในพื้นที่สถานะอุปกรณ์จะแสดงสถานะความผิดพลาดของเฟรม SPI ล่าสุด:
► รีจิสเตอร์ข้อผิดพลาดระบุว่ามีการตั้งค่าแฟล็กในรีจิสเตอร์ FAULT
► SPI CRC ระบุว่าตรวจพบข้อผิดพลาด CRC ของเฟรม SPI หรือไม่
► SPI Flag คือแฟล็กข้อผิดพลาด ซึ่งมีอยู่ในเฟรม SPI ของ ADMT4000 ซึ่งระบุว่ามีการตั้งค่าแฟล็กในรีจิสเตอร์ FAULT ของ ADMT4000
ช่วย
มีปุ่มช่วยเหลือหลายปุ่มกระจายอยู่ทั่ว GUI การประเมิน ADMT4000 เช่นampโปรดดูฉลาก 13 ในรูปที่ 18 คุณลักษณะช่วยเหลือเช่นนี้ได้รับการออกแบบมาเพื่อช่วยเหลือผู้ใช้ด้วยคุณลักษณะที่เลือก
แท็บยูทิลิตี้
แท็บยูทิลิตี้ (ดูรูปที่ 22) ช่วยให้สามารถเข้าถึงรีจิสเตอร์ FAULT และอนุญาตให้ควบคุม GPIO ของ ADMT4000 นอกเหนือจากทรัพยากรอื่นๆ ซึ่งมีรายละเอียดอยู่ในหัวข้อต่อไปนี้
 รูปที่ 22 แท็บยูทิลิตี้
รูปที่ 22 แท็บยูทิลิตี้
ตารางที่ 11 แสดงคำอธิบายของฉลากในแท็บยูทิลิตี้ (ดูรูปที่ 22)
ตารางที่ 11 คำอธิบายสำหรับป้ายแท็บยูทิลิตี้
| หมายเลขฉลาก | ชื่อฉลาก | คำอธิบาย |
| 1 | บันทึกคำสั่ง | บันทึกคำสั่ง SPI ที่สร้างโดย GUI |
| 2 | ฟังก์ชั่น DIGIO | เปิดใช้งานการควบคุมฟังก์ชันพอร์ต GPIO |
| 3 | มอนิเตอร์ GPIO | สถานะปัจจุบันของ GPIO |
| 4 | ลงทะเบียนความผิดพลาด | สถานะการลงทะเบียนข้อผิดพลาด |
| 5 | ความถี่สัญญาณนาฬิกา SPI (Hz) | การควบคุมความถี่สัญญาณนาฬิกา SPI |
| 6 | การกำหนดค่าผู้ใช้ | การควบคุมการกำหนดค่าผู้ใช้ |
บันทึกคำสั่ง
Command Log (Label 1 ในรูปที่ 22) สามารถจับคำสั่ง SPI ที่ออกโดย GUI เพื่อควบคุม ADMT4000 หากต้องการเปิดใช้งานฟีเจอร์นี้ ให้เลือกกล่องกาเครื่องหมาย Record Enable (เปิดใช้งานการบันทึก) คลิก SAVE (บันทึก) เพื่อบันทึกไฟล์บันทึก และคลิกไอคอน Recycle Bin (ถังขยะรีไซเคิล) เพื่อล้างไฟล์บันทึก
ฟังก์ชั่น DIGIO
พอร์ต GPIO บน ADMT4000 สามารถกำหนดค่าด้วยการควบคุมฟังก์ชัน DIG-IO ได้ (ป้ายกำกับ 2 ในรูปที่ 22) เมื่อ GUI การประเมิน ADMT4000 เริ่มทำงาน พอร์ต GPIO จะเพิ่มขึ้นตามการกำหนดค่า ADMT4000 Config.csv fileโปรดทราบว่าสามารถเลือกฟังก์ชันในเมนูแบบเลื่อนลงพอร์ตเพื่อเปลี่ยนการทำงานของพอร์ตเหล่านี้ได้
มอนิเตอร์ GPIO
GPIO Monitor (ป้ายกำกับ 3 ในรูปที่ 22) จะแสดงระดับลอจิกปัจจุบันของพอร์ต GPIO สีเขียวอ่อนแสดงถึงสถานะสูงบนพอร์ต และสีเขียวเข้มแสดงถึงสถานะต่ำ
ลงทะเบียนความผิดพลาด
รีจิสเตอร์ FAULT (ป้ายกำกับ 4 ในรูปที่ 22) แสดงสถานะล่าสุดของรีจิสเตอร์ FAULT ของ ADMT4000 สีแดงอ่อนแสดงว่ามีการตั้งค่าแฟล็ก FAULT และสีแดงเข้มแสดงว่าตรวจพบข้อผิดพลาด ในรูปที่ 22 รีจิสเตอร์ FAULT แสดงว่าไม่มีการตรวจพบข้อผิดพลาด
ความถี่สัญญาณนาฬิกา SPI (Hz)
หากต้องการปรับเปลี่ยนนาฬิกา SPI ของ SDP ให้ปรับปรุงกล่องความถี่นาฬิกา SPI (Hz) (ป้ายกำกับ 5 ในรูปที่ 22)
การกำหนดค่าผู้ใช้
ในการอัปโหลดการกำหนดค่า file เมื่อใดก็ตาม ให้ไปที่พื้นที่การกำหนดค่าผู้ใช้ของแท็บยูทิลิตี้ (ป้ายชื่อ 6 ในรูปที่ 22) และดำเนินการดังต่อไปนี้:
► เลือกการกำหนดค่าผู้ใช้ที่ต้องการ file.
► คลิกอัพโหลด
► เมื่อกำหนดค่าเสร็จแล้ว file เมื่ออัปโหลด ADMT4000 จะถูกกำหนดค่าใหม่ โปรดทราบว่าหน้าต่าง Read Reg Report จะแสดงสถานะของรีจิสเตอร์ผู้ใช้หลังจากกำหนดค่าใหม่
การกำหนดค่า File
การกำหนดค่า file สำหรับ EVAL-ADMT4000SD1Z ประกอบด้วยการตั้งค่าการเริ่มต้น GUI การประเมิน ADMT4000 ซึ่งจะกำหนด ADMT4000 ให้เป็นสถานะที่ผู้ใช้กำหนดเมื่อเปิดใช้งานแอปพลิเคชัน ไม่สามารถเปลี่ยนชื่อรีจิสเตอร์ได้ อย่างไรก็ตาม ผู้ใช้สามารถปรับเปลี่ยนการตั้งค่ารีจิสเตอร์ที่ตามหลังชื่อรีจิสเตอร์ได้ file จะต้องบันทึกในรูปแบบ *.csv ที่คั่นด้วยจุลภาค
เนื้อหาของการกำหนดค่าที่ให้มา file (ADMT4000 Config.csv) มีเนื้อหาต่อไปนี้:

แท็บการสอบเทียบ
แท็บการปรับเทียบช่วยให้ผู้ใช้สามารถเข้าถึงคุณลักษณะการปรับเทียบของ ADMT4000 หากต้องการทำการปรับเทียบ ADMT4000 จะต้องกำหนดค่าในระบบที่มีมอเตอร์พร้อมแม่เหล็กปลายเพลา ซึ่งไม่มีให้ในชุดประเมินผล เซ็นเซอร์ ADMT4000 จะต้องจัดตำแหน่งให้ตรงกับจุดศูนย์กลางของเพลามอเตอร์และจุดศูนย์กลางของแม่เหล็กอย่างแม่นยำ
กระบวนการสอบเทียบใน GUI ประกอบด้วยขั้นตอนต่อไปนี้:
- เปิดใช้งานมอเตอร์ด้วยความเร็วต่อเนื่อง
- รวบรวมการสอบเทียบampข้อมูล
- สร้างค่าสัมประสิทธิ์การสอบเทียบ
- ทดสอบประสิทธิภาพเชิงมุมด้วยค่าสัมประสิทธิ์การสอบเทียบ
- กำหนดค่า ADMT4000 ด้วยค่าสัมประสิทธิ์การสอบเทียบที่สร้างขึ้น
ค่าสัมประสิทธิ์การสอบเทียบประกอบด้วยการแก้ไขระบบสำหรับฮาร์มอนิกที่ 1, 2, 3 และ 8 ของ sampข้อมูล LED ข้อผิดพลาดฮาร์มอนิกเกิดจากค่าความคลาดเคลื่อนของระบบ รวมถึงการเคลื่อนที่ของแกน x และแกน y ระหว่างเซ็นเซอร์และแม่เหล็ก
ผู้ใช้สามารถตรวจสอบผลลัพธ์ของการสอบเทียบและกำหนดค่า ADMT4000 ใหม่ด้วยค่าสัมประสิทธิ์ที่สร้างขึ้น
 รูปที่ 23 แท็บการปรับเทียบ
รูปที่ 23 แท็บการปรับเทียบ
แท็บการสอบเทียบจะแสดงอยู่ในรูปที่ 23 ตารางที่ 12 แสดงคำอธิบายของฉลากในแท็บการสอบเทียบ (ดูรูปที่ 23)
ตารางที่ 12 คำอธิบายสำหรับป้ายแท็บการสอบเทียบ
| หมายเลขฉลาก | ชื่อฉลาก | คำอธิบาย |
| 1 | แหล่งข้อมูลการสอบเทียบ | ควบคุมแหล่งที่มาของข้อมูลการสอบเทียบ |
| 2 | Sampการควบคุม | ควบคุมรอบต่อนาทีของมอเตอร์ภายนอก จำนวนรอบของมอเตอร์ จำนวนรอบทั้งหมดampเลส เพื่อรับซื้อampต่อการหมุน และ Sampความถี่ (Hz) |
| 3 | ตัวระบุระยะ | เปลี่ยนจากสีเขียวเข้มเป็นสีเขียวอ่อนเมื่อถูกต้องampเลือกการกำหนดค่าแล้ว |
| 4 | เริ่ม | เริ่มขั้นตอนการสอบเทียบ |
| 5 | การสอบเทียบ Sampเลส | แผนภูมิของสampข้อมูลที่ใช้ในการคำนวณค่าสัมประสิทธิ์ |
| 6 | กราฟข้อผิดพลาดเชิงมุม PreCal | พล็อตพื้นที่สำหรับข้อมูลก่อนการสอบเทียบ และแสดงข้อผิดพลาดเชิงมุมของระบบในโดเมนความถี่และโดเมนเวลา |
| 7 | กราฟข้อผิดพลาดเชิงมุมของ PostCal | พล็อตพื้นที่สำหรับข้อมูลการสอบเทียบภายหลัง และแสดงข้อผิดพลาดเชิงมุมของระบบในโดเมนเวลาหรือโดเมนความถี่ |
| 8 | การสอบเทียบคำนวณ | แสดงค่าสัมประสิทธิ์การสอบเทียบจากการคำนวณรูทีนการสอบเทียบครั้งล่าสุด |
| 9 | ข้อมูลแคล | คลิกข้อมูล Cal เพื่อบันทึกสampข้อมูลไปยัง file |
| 10 | การกำหนดค่า | คลิกกำหนดค่าเพื่อกำหนดค่า ADMT4000 ใหม่ด้วยค่าสัมประสิทธิ์การสอบเทียบล่าสุด |
แหล่งข้อมูลการสอบเทียบ
ในการดำเนินการสอบเทียบโดยผู้ใช้ EVAL-ADMT4000SD1Z จะต้องกำหนดค่าด้วยมอเตอร์ และจะต้องตั้งค่าการควบคุมแหล่งข้อมูลการสอบเทียบเป็น ADMT4000
โหมดการทำงานเพิ่มเติมสองโหมดต่อไปนี้สำหรับกิจวัตรการสอบเทียบจะพร้อมใช้งานและสามารถเลือกได้ภายในการควบคุมแหล่งข้อมูลการสอบเทียบ:
► ค่าสัมประสิทธิ์ฮาร์โมนิกของผู้ใช้ช่วยให้ผู้ใช้สามารถป้อนค่าสัมประสิทธิ์ที่กำหนดเองได้ (ดูส่วนการสอบเทียบที่คำนวณได้) และสังเกตข้อผิดพลาดที่เกิดขึ้น อย่างไรก็ตาม ต้องใช้มอเตอร์สำหรับฟังก์ชันนี้
► ตัวอย่างample Data นำเสนอชุดข้อมูลทั่วไป การแปลงฟูเรียร์อย่างรวดเร็ว (FFT) และค่าสัมประสิทธิ์การสอบเทียบที่คำนวณได้จะแสดงใน GUI การประเมิน ADMT4000 โปรดทราบว่าในกรณีนี้ จะไม่สามารถแสดงการสอบเทียบภายหลังได้
Sampการควบคุม
กำหนดค่า sampพื้นที่ควบคุมเมื่อ GUI ทำงานร่วมกับมอเตอร์ ดังนี้:
► รอบต่อนาทีของมอเตอร์ภายนอก คือ ความเร็วรอบของมอเตอร์ภายนอก
► จำนวนการหมุนคือจำนวนการหมุนที่ใช้ในการจับข้อมูลมุมจาก ADMT4000
► สamples to Acquire คือจำนวนรวมของ sampเพื่อที่จะได้มา
► สamples per Rotation คือจำนวนรวมของ sampต่อการหมุน
► สampความถี่ (Hz) คือ sampความถี่เป็นเฮิรตซ์
ขอแนะนำให้ใช้การหมุนแม่เหล็ก 11 ครั้งสำหรับขั้นตอนการสอบเทียบ จำนวนวินาทีทั้งหมดampจำนวน s ที่ถูกจับได้จากการหมุน 11 รอบจะต้องเป็นเลขยกกำลัง 2 เพื่อให้แน่ใจว่า FFT มีความสอดคล้องกัน จำนวน s ทั้งหมดขั้นต่ำที่แนะนำampมีค่าเท่ากับ 2¹⁰ (1024) ใน 11 รอบ สิ่งสำคัญที่ต้องทราบคือ ในระหว่างกระบวนการปรับเทียบ แม่เหล็กจะต้องหมุนด้วยความเร็วคงที่ มิฉะนั้น ข้อผิดพลาดของความเร็วของมอเตอร์จะเพิ่มข้อผิดพลาดเชิงมุมเข้าไปด้วย
ตัวบ่งชี้ In Range (ฉลาก 3 ในรูปที่ 23) จะเปลี่ยนจากสีเขียวเข้มเป็นสีเขียวอ่อนเมื่อสถานะถูกต้องampเลือกการกำหนดค่าแล้ว
เริ่ม
คลิกเริ่มเพื่อเริ่มกระบวนการปรับเทียบ ก่อนคลิกเริ่ม ตรวจสอบให้แน่ใจก่อนว่ามอเตอร์ภายนอกถึงสถานะคงที่แล้วก่อนเริ่มกระบวนการปรับเทียบ
การสอบเทียบ Sampเลส
การสอบเทียบ Sampพล็อตจะแสดงไซน์และโคไซน์ที่จับได้ในโค้ด ADC และมุมที่คำนวณจากไซน์และโคไซน์
กราฟข้อผิดพลาดเชิงมุม PreCal
กราฟข้อผิดพลาดเชิงมุม PreCal จะแสดง FFT ของข้อมูลที่จับได้หรือ FFT ของข้อมูลที่ให้ไว้ใน exampข้อมูลเลอ file.
กราฟข้อผิดพลาดเชิงมุมของ PostCal
กราฟข้อผิดพลาดเชิงมุมของ PostCal จะแสดง FFT ของ ADMT4000 พร้อมค่าสัมประสิทธิ์ที่คำนวณได้
การสอบเทียบคำนวณ
พื้นที่การสอบเทียบที่คำนวณมีแท็บที่ทำให้ผู้ใช้สังเกตค่าสัมประสิทธิ์ที่คำนวณได้เป็นองศาหรือรหัส HEX ที่ใช้ในการกำหนดค่ารีจิสเตอร์ค่าสัมประสิทธิ์การสอบเทียบ ADMT4000
เมื่อเลือกค่าสัมประสิทธิ์ฮาร์มอนิกของผู้ใช้ในพื้นที่ควบคุมแหล่งข้อมูลการสอบเทียบ ผู้ใช้สามารถป้อนค่าลงในแท็บรหัส HEX ในพื้นที่การสอบเทียบที่คำนวณได้ เมื่อการสอบเทียบทำงานในโหมดนี้ ข้อผิดพลาดเชิงมุมที่เกิดขึ้นจะแสดงขึ้นพร้อมกับผู้ใช้
ค่าสัมประสิทธิ์
ข้อมูลแคล
หลังจากทำตามขั้นตอนการสอบเทียบแล้ว ให้คลิกที่ Cal Data เพื่อบันทึกข้อมูลที่บันทึกไว้
การกำหนดค่า
คลิกกำหนดค่าเพื่ออัพเดต ADMT4000 ด้วยค่าสัมประสิทธิ์การสอบเทียบที่ป้อนไว้ในพื้นที่ควบคุมการสอบเทียบที่คำนวณ
แผนผังและขนาดของบอร์ด
แผนผัง PCB สำหรับ EVAL-ADMT4000SD1Z แสดงอยู่ในรูปที่ 24 และรูปที่ 25 ขนาดของ PCB แสดงอยู่ในรูปที่ 26 ตำแหน่งของเซ็นเซอร์ AMR จะต้องอยู่ใกล้กับจุดศูนย์กลางของแกนหมุนให้มากที่สุด
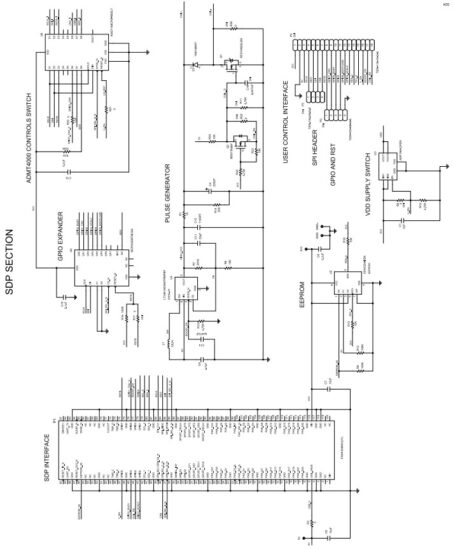 รูปที่ 24 แผนผังส่วนอินเทอร์เฟซ SDP ของ EVAL-ADMT4000SD1Z
รูปที่ 24 แผนผังส่วนอินเทอร์เฟซ SDP ของ EVAL-ADMT4000SD1Z รูปที่ 25 แผนผังการแยกส่วนบอร์ดของ EVAL-ADMT4000SD1Z
รูปที่ 25 แผนผังการแยกส่วนบอร์ดของ EVAL-ADMT4000SD1Z รูปที่ 26 ขนาด EVAL-ADMT4000SD1Z หน่วยเป็นมิลลิเมตร [นิ้ว]
รูปที่ 26 ขนาด EVAL-ADMT4000SD1Z หน่วยเป็นมิลลิเมตร [นิ้ว]
สำหรับรายละเอียดเกี่ยวกับตำแหน่งเซ็นเซอร์ภายในแพ็คเกจ โปรดดูแผ่นข้อมูล ADMT4000 เมื่ออ้างอิงหมายเลขฉลากในรูปที่ 26 ฉลาก 1 จะแสดงรูยึด SDP
ขนาดรูติดตั้งแสดงในรูปที่ 26 และตารางที่ 13
ตารางที่ 13 ขนาดรูยึด EVAL-ADMT4000SD1Z
| เครื่องหมาย | เส้นผ่านศูนย์กลาง (มม.) | การชุบ |
| A | 2.2 | ไม่ชุบ |
| B | 3.175 | ไม่ชุบ |
| C | 3.2 | ไม่ชุบ |
ข้อมูลการสั่งซื้อ
บิลวัสดุ
ตารางที่ 14 รายการวัสดุ
| ส่วนประกอบ | คำอธิบาย | ผู้ผลิต | หมายเลขชิ้นส่วน |
| ซี1,ซี2 | ตัวเก็บประจุเซรามิก 1 µF, 10 V, 5%, X8L, 0805, AEC-Q200 | เคเมท | C0805C105J8NACออโต้ |
| ซี3, ซี8, ซี13 | ตัวเก็บประจุเซรามิก 0.1 µF, 35 V, 10%, X7R, 0402, AEC-Q200 | ทีดีเค | CGA2B3X7R1V104K050BB |
| C4 | ค่า ESR ต่ำ | วิชชัย | MAL216099103E3 |
| ตัวเก็บประจุอลูมิเนียมอิเล็กโทรไลต์ 220 µF 50 V 20% 12.5 มม. | |||
| × 16 มม., AEC-Q200, 550 มิลลิแอมป์ | |||
| ซี5,ซี7 | ตัวเก็บประจุแบบเซรามิก 10 µF, 6.3 V, 20%, X7R, 0603 | ซัมซุง | CL10B106MQ8NRNC |
| C6, C10, C15, C18, C19 | ตัวเก็บประจุเซรามิก 0.1 µF, 50 V, 10%, X8R, 0603, AEC-Q200 | ทีดีเค | CGA3E3X8R1H104K080AB |
| C9 | ตัวเก็บประจุเซรามิก 4.7 µF, 16 V, 5%, X7R, 0805, AEC-Q200 | เคเมท | C0805X475J4RACออโต้ |
| ซี11 | ตัวเก็บประจุเซรามิก 22 pF, 100 V, 5%, C0G, 0603, AEC-Q200 | ทีดีเค | CGA3E2NP02A220J080AA |
| ซี12 | ตัวเก็บประจุเซรามิก 1100 pF, 50 V, 1%, X8G, 0603, AEC-Q200 | มุราตะ | GCM1885G1H112FA16D |
| ซี14 | ตัวเก็บประจุเซรามิก 0.047 µF, 25 V, 10%, X8R, 0402, AEC-Q200, การยุติแบบอ่อน | ทีดีเค | CGA2B1X8R1E473K050BE |
| ซี16 | ตัวเก็บประจุเซรามิก 0.047 µF, 0.047 µF, 25 V, 10% X8R, 0402, อาเซียน-Q200 |
ทีดีเค | CGA2B1X8R1E473K050BE |
| ซี17 | ตัวเก็บประจุเซรามิก 2 pF, 25 V, 0.1 pF, C0G, 0402 | แอ๊กซ์วี | 04023U2R0BAT2A |
| D1 | ไดโอด การนำไฟฟ้าสูง สวิตชิ่งเร็ว | แฟร์ไชลด์ เซมิคอนดักเตอร์ | 1N914BWT |
| ดีเอส1,ดีเอส2 | ไดโอด ไฮเปอร์ไบรท์ กระแสต่ำ ไดโอดเปล่งแสง (LED) สีเขียว | ออสแรม ออปโต เซมิคอนดักเตอร์ | LGL29K-G2J1-24-Z |
| L1 | ตัวเหนี่ยวนำ ลวดพัน 15 μH 10% 2.52 MHz 0.6 A 0.5 Ω 1812 AEC-Q200 | ทีดีเค | B82432T1153K000 |
| P1 | ขั้วต่อบอร์ดต่อบอร์ด 120 ตำแหน่ง ระยะห่าง 0.6 มม. | HR | FX8-120S-SV(21) |
| P3 | แถบส่วนหัว PCB 4 ตำแหน่ง ระยะห่าง 0.100 นิ้ว | samtec | TSW-104-08-GS |
| P2 | แถบส่วนหัว PCB 5 ตำแหน่ง ระยะห่าง 0.100 นิ้ว | samtec | TSW-105-08-GS |
| P4 | แถบส่วนหัว PCB 18 ตำแหน่ง ระยะห่าง 0.100 นิ้ว | samtec | TSW-118-16-GS |
| พี5,พี6 | แถบส่วนหัว PCB 2 ตำแหน่ง ระยะห่าง 0.100 นิ้ว | Ampฮีนอล | 9157-102HLF |
| P7 | ส่วนหัว PCB 15 ตำแหน่ง ระยะห่างระหว่างพิน 0.100 นิ้ว มุมฉาก | โมเล็กซ์ | 53048-1510 |
| Q1 | N-channel MOSFET, 14 A, 50 V, DPAK 3 พิน | โอนเซมิ | RFD14N05LSM |
| Q2 | MOSFET แบบ N-channel, 200 mA, 50 V, SOT-3 23 พิน | ไดโอดรวม | BSS138-7-ฟ |
| R1 | ตัวต้านทาน SMD 1 kΩ, 1%, 1/8 วัตต์, 0805, AEC-Q200 | พานาโซนิค | ERJ-6ENF1001V |
| R2 | ตัวต้านทาน SMD 0.005 Ω 1% 2 W 2512 ขั้วกว้าง | โอไมท์ | LVK25R005FER |
| R3, R6, R17, R20, R21, R25, | ตัวต้านทาน SMD 0 Ω จัมเปอร์ 1/10 W 0402 AEC-Q200 | พานาโซนิค | ERJ-2GE0R00X |
| R26 ถึง R28, R31, R4, R9, R12, R16, R19, R29, R30, R34 ถึง R37, R40 ถึง R42 | ตัวต้านทาน SMD 100 kΩ 5% 1/10 W 0402 AEC-Q200 | พานาโซนิค | ERJ-2GEJ104X |
| อาร์5,อาร์33 | ตัวต้านทาน SMD 1.5 kΩ 1% 1/10 W 0603 AEC-Q200 | พานาโซนิค | ERJ-3EKF1501V |
| R7 | ตัวต้านทาน SMD 261 kΩ, 0.1%, 1/8 วัตต์, 0805, AEC-Q200 | พานาโซนิค | ศก-6AEB2613V |
| R8 | ตัวต้านทาน SMD 10 kΩ, 0.1%, 1/8 วัตต์, 0805, AEC-Q200 | พานาโซนิค | ศก-6AEB103V |
| R10 R11 R15 R22 | ตัวต้านทาน SMD 4.75 kΩ 1% 1/10 W 0402 AEC-Q200 | พานาโซนิค | ERJ-2RKF4751X |
| อาร์13,อาร์18 | ตัวต้านทาน SMD 10 kΩ 1% 1/8 W 0805 AEC-Q200 | พานาโซนิค | ERJ-6ENF1002V |
| R14 | ตัวต้านทาน SMD 20 kΩ, 1%, 1/8 วัตต์, 0805, AEC-Q200 | พานาโซนิค | ERJ-6ENF2002V |
| อาร์23,อาร์24 | ตัวต้านทาน SMD 10 kΩ 5% 1/10 W 0603 AEC-Q200 | พานาโซนิค | ERJ-3GEYJ103V |
| R32 | ตัวต้านทาน SMD 0.1 Ω 1% 1/6 วัตต์ 0402 AEC-Q200 | พานาโซนิค | ERJ-2BSFR10X |
| อาร์38,อาร์39 | ตัวต้านทาน SMD 1 MΩ 1% 1/10 W 0603 AEC-Q200 | พานาโซนิค | ERJ-3EKF1004V |
| U1 | เซ็นเซอร์หมุนหลายทิศทางเมื่อเปิดเครื่องจริง | อุปกรณ์แอนะล็อก | ADMT4000บรูซาบ |
| U2 | ไอซี 32 กิโลบิต EEPROM แบบอนุกรม | เทคโนโลยีไมโครชิป | 24AA32A-I/SN |
| U3 | สวิตช์ไฟด้านสูงควบคุมด้วยลอจิก 5 V, 3 A | อุปกรณ์แอนะล็อก | ADP196ACPZN-R7 |
| U4 | ตัวแปลง DC/DC แบบเพิ่มแรงดัน 3 MHz พร้อม Schottky ในตัวใน SOT แบบบาง | อุปกรณ์แอนะล็อก แอล | LT3461AES6#TRMPBF |
| U5 | อินเทอร์เฟซต่อพ่วงแบบอนุกรมขยาย IC (SPI), อินพุตและเอาต์พุตเอนกประสงค์ (GPIO), 8 บิต | เทคโนโลยีไมโครชิป | MCP23S08T-E/เอสเอส |
| U6 | CMOS, ปริมาณต่ำtage, SPI/QSPI/รองรับ Microwire อินเทอร์เฟซ ควบคุมแบบอนุกรม สวิตช์ SPST อ็อกทัล |
อุปกรณ์แอนะล็อก | ADG714BCPZ-รีล7 |
![]() ข้อควรระวัง ESD
ข้อควรระวัง ESD
อุปกรณ์ที่ไวต่อไฟฟ้าสถิต (ESD) อุปกรณ์และแผงวงจรที่มีประจุไฟฟ้าสามารถคายประจุไฟฟ้าได้โดยไม่ถูกตรวจจับ แม้ว่าผลิตภัณฑ์นี้จะมีวงจรป้องกันที่ได้รับสิทธิบัตรหรือเป็นกรรมสิทธิ์ แต่ก็อาจเกิดความเสียหายกับอุปกรณ์ที่ได้รับไฟฟ้าสถิตพลังงานสูงได้ ดังนั้น ควรใช้มาตรการป้องกันไฟฟ้าสถิตที่เหมาะสมเพื่อหลีกเลี่ยงการเสื่อมประสิทธิภาพหรือการสูญเสียฟังก์ชันการทำงาน
ข้อกำหนดและเงื่อนไขทางกฎหมาย
โดยการใช้บอร์ดประเมินผลตามที่หารือกันในที่นี้ (ร่วมกับเครื่องมือ ส่วนประกอบ เอกสารประกอบ หรือสื่อสนับสนุนใดๆ เรียกว่า “บอร์ดประเมินผล”) แสดงว่าคุณตกลงที่จะผูกพันตามข้อกำหนดและเงื่อนไขที่ระบุไว้ด้านล่าง (“ข้อตกลง”) เว้นแต่คุณได้ซื้อบอร์ดประเมินผล ซึ่งในกรณีนี้ ข้อกำหนดและเงื่อนไขการขายมาตรฐานของ Analog Devices จะใช้บังคับ อย่าใช้บอร์ดประเมินผลจนกว่าคุณจะอ่านและยอมรับข้อตกลง การใช้งานบอร์ดประเมินผลของคุณถือเป็นการแสดงว่าคุณยอมรับข้อตกลง ข้อตกลงนี้ทำขึ้นโดยและระหว่างคุณ (“ลูกค้า”) และ Analog Devices, Inc. (“ADI”) ซึ่งมีสถานประกอบการหลักอยู่ที่ ภายใต้ข้อกำหนดและเงื่อนไขของข้อตกลง ADI จึงยินยอมให้สิทธิ์ใช้งานบอร์ดประเมินผลแก่ลูกค้าโดยไม่มีค่าใช้จ่าย ไม่จำกัด ส่วนบุคคล ชั่วคราว ไม่ผูกขาด ไม่สามารถออกใบอนุญาตให้ผู้อื่นใช้ได้ และไม่สามารถโอนสิทธิ์ได้ เพื่อวัตถุประสงค์ในการประเมินเท่านั้น ลูกค้าเข้าใจและตกลงว่าคณะกรรมการประเมินผลนั้นจัดทำขึ้นเพื่อวัตถุประสงค์เดียวและเฉพาะตามที่อ้างอิงข้างต้นเท่านั้น และตกลงที่จะไม่ใช้คณะกรรมการประเมินผลเพื่อวัตถุประสงค์อื่นใดทั้งสิ้น นอกจากนี้ ใบอนุญาตที่ได้รับจะต้องมีข้อจำกัดเพิ่มเติมดังต่อไปนี้ด้วย: ลูกค้าจะต้องไม่ (i) เช่า ให้เช่า แสดง ขาย โอน มอบหมาย อนุญาตให้ใช้สิทธิ์ต่อ หรือแจกจ่ายบอร์ดประเมินผล และ (ii) อนุญาตให้บุคคลที่สามเข้าถึงบอร์ดประเมินผลได้ ตามที่ใช้ในที่นี้ คำว่า "บุคคลที่สาม" หมายความรวมถึงนิติบุคคลอื่นใดนอกเหนือจาก ADI, ลูกค้า, พนักงาน, บริษัทในเครือ และที่ปรึกษาภายในองค์กร บอร์ดประเมินผลจะไม่ถูกขายให้แก่ลูกค้า สิทธิทั้งหมดที่ไม่ได้ให้ไว้โดยชัดแจ้งในที่นี้ รวมถึงกรรมสิทธิ์ของบอร์ดประเมินผล ได้รับการสงวนไว้โดย ADI ความลับ ข้อตกลงนี้และคณะกรรมการประเมินผลถือเป็นข้อมูลที่เป็นความลับและเป็นกรรมสิทธิ์ของ ADI ลูกค้าจะไม่สามารถเปิดเผยหรือโอนส่วนใด ๆ ของคณะกรรมการประเมินผลให้กับบุคคลอื่นใดได้ไม่ว่าด้วยเหตุผลใดก็ตาม เมื่อหยุดใช้บอร์ดประเมินผลหรือยุติข้อตกลงนี้ ลูกค้าตกลงที่จะส่งคืนบอร์ดประเมินผลให้กับ ADI ทันที ข้อจำกัดเพิ่มเติม ลูกค้าจะไม่สามารถถอดประกอบ ถอดรหัส หรือวิศวกรรมย้อนกลับชิปบนบอร์ดประเมินผลได้ ลูกค้าจะต้องแจ้งให้ ADI ทราบถึงความเสียหายที่เกิดขึ้น หรือการดัดแปลงหรือแก้ไขใดๆ ที่ทำกับคณะกรรมการประเมินผล ซึ่งรวมถึงแต่ไม่จำกัดเพียงการบัดกรีหรือกิจกรรมอื่นใดที่ส่งผลต่อเนื้อหาที่สำคัญของคณะกรรมการประเมินผล การปรับเปลี่ยนคณะกรรมการประเมินผลจะต้องเป็นไปตามกฎหมายที่บังคับใช้ รวมถึงแต่ไม่จำกัดเพียงข้อกำหนด RoHS การสิ้นสุด ADI อาจยกเลิกข้อตกลงนี้ได้ตลอดเวลาโดยแจ้งให้ลูกค้าทราบเป็นลายลักษณ์อักษร ลูกค้าตกลงที่จะส่งคืนให้กับคณะกรรมการประเมินผล ADI ในขณะนั้น การจำกัดความรับผิด คณะกรรมการประเมินผลที่จัดให้มีขึ้นภายใต้เอกสารนี้ให้ไว้ "ตามที่เป็น" และ ADI ไม่รับประกันหรือรับรองใดๆ ทั้งสิ้นเกี่ยวกับเรื่องนี้ ADI ขอปฏิเสธการรับรอง การรับประกัน หรือการรับประกันใดๆ ไม่ว่าโดยชัดแจ้งหรือโดยปริยาย ที่เกี่ยวข้องกับคณะกรรมการประเมินผล รวมถึงแต่ไม่จำกัดเฉพาะ การรับประกันโดยปริยายของความสามารถในการขาย ชื่อกรรมสิทธิ์ ความเหมาะสมสำหรับวัตถุประสงค์เฉพาะ หรือการไม่ละเมิดสิทธิในทรัพย์สินทางปัญญา ในกรณีใดๆ ADI และผู้ให้ใบอนุญาตจะไม่รับผิดชอบต่อความเสียหายโดยบังเอิญ พิเศษ โดยอ้อม หรือเป็นผลสืบเนื่องที่เกิดจากการครอบครองหรือใช้กระดานประเมินผลของลูกค้า รวมถึงแต่ไม่จำกัดเพียงผลกำไรที่สูญเสียไป ต้นทุนความล่าช้า ต้นทุนแรงงาน หรือการสูญเสียชื่อเสียงทางการค้า ความรับผิดทั้งหมดของ ADI จากสาเหตุใดๆ ก็ตามจะจำกัดอยู่ในจำนวนเงินหนึ่งร้อยดอลลาร์สหรัฐ (100.00 ดอลลาร์) ส่งออก. ลูกค้าตกลงว่าจะไม่ส่งออกคณะกรรมการประเมินผลไปยังประเทศอื่นโดยตรงหรือโดยอ้อม และจะปฏิบัติตามกฎหมายและระเบียบข้อบังคับของรัฐบาลกลางสหรัฐอเมริกาที่บังคับใช้ทั้งหมดที่เกี่ยวข้องกับการส่งออก กฎหมายที่ใช้บังคับ ข้อตกลงนี้ต้องได้รับการควบคุมและตีความตามกฎหมายพื้นฐานของเครือรัฐแมสซาชูเซตส์ (ไม่รวมถึงกฎข้อขัดแย้งของกฎหมาย) การดำเนินคดีทางกฎหมายใดๆ เกี่ยวกับข้อตกลงนี้จะพิจารณาในศาลของรัฐหรือรัฐบาลกลางที่มีเขตอำนาจศาลใน Suffolk County รัฐแมสซาชูเซตส์ และลูกค้ายินยอมให้ศาลดังกล่าวมีเขตอำนาจศาลและสถานที่พิจารณาคดีด้วยตนเอง
![]() ©2024 Analog Devices, Inc. สงวนลิขสิทธิ์
©2024 Analog Devices, Inc. สงวนลิขสิทธิ์
เครื่องหมายการค้าและเครื่องหมายการค้าจดทะเบียนเป็นทรัพย์สินของเจ้าของที่เกี่ยวข้อง
One Analog Way, วิลมิงตัน, MA 01887-2356, สหรัฐอเมริกา
เอกสาร / แหล่งข้อมูล
 |
เซ็นเซอร์ตรวจจับตำแหน่งการหมุนหลายรอบแบบ True Power สำหรับอุปกรณ์อะนาล็อก ADMT4000 [พีดีเอฟ] คู่มือการใช้งาน ADMT4000 เซ็นเซอร์ตำแหน่งการหมุนหลายรอบเมื่อเปิดเครื่องจริง, ADMT4000, เซ็นเซอร์ตำแหน่งการหมุนหลายรอบเมื่อเปิดเครื่องจริง, เซ็นเซอร์ตำแหน่งการหมุนหลายรอบเมื่อเปิดเครื่อง, เซ็นเซอร์ตำแหน่งการหมุนหลายรอบเมื่อเปิดเครื่อง, เซ็นเซอร์ตำแหน่งการหมุนหลายรอบ, เซ็นเซอร์ตำแหน่ง, เซ็นเซอร์ |